Slider-Crank
Generic slider-crank mechanism

Libraries:
Simscape /
Foundation Library /
Mechanical /
Mechanisms
Description
The Slider-Crank block represents the slider-crank mechanism as a converter between the continuous rotational motion of the crank and the oscillating translational motion of the slider.
The mechanism has two connections:
Port C corresponds to the crank and is a mechanical rotational conserving port.
Port S corresponds to the slider and is a mechanical translational conserving port.
The Crank radius and Rod length parameters describe the mechanism geometry. The Crank inertia parameter helps move the mechanism through the positions at the top and bottom when the rod is exactly aligned with the center of the crank.
The purpose of the Slider stiffness and Slider damping parameters is to reduce inertia coupling between the ports, which can cause computational issues. The block applies the stiffness and damping between the ideal position of the slider (as calculated by the geometry) and the actual position of the translational conserving port, S. This compliance avoids a direct nonlinear coupling between the ports. Higher stiffness causes the motion to be closer to ideal, but increases the system stiffness. The damping helps smooth the ringing that can be caused by the stiffness.
Variables
You can set initialization targets for the crank angle and velocity at the start of simulation, using both positive and negative values.
To set the priority and initial target values for the block variables prior to simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
Nominal values provide a way to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources, one of which is the Nominal Values section in the block dialog box or Property Inspector. For more information, see Modify Nominal Values for a Block Variable.
Examples
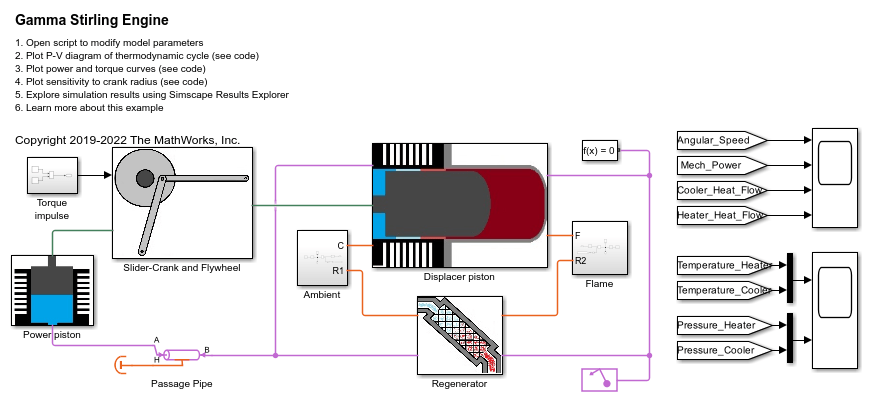
Gamma Stirling Engine
Model a Gamma Stirling engine using gas, thermal, and mechanical Simscape™ components and domains.
Ports
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2019a