Translational Damper
机械平移系统中的粘性阻尼器

库:
Simscape /
Foundation Library /
Mechanical /
Translational Elements
描述
Translational Damper 模块表示理想的机械平移粘性阻尼器,用以下方程描述:
其中
F 是通过阻尼器传输的力。
D 是阻尼系数,由粘性摩擦定义。
v 是相对速度。
vR 和 vC 分别是端口 R 和 C 的绝对速度。
此模块的正方向是从端口 R 到端口 C。这意味着如果力的作用方向为从 R 到 C,则力为正。
变量
要在仿真之前设置模块变量的优先级和初始目标值,请使用模块对话框或属性检查器中的初始目标部分。有关详细信息,请参阅设置模块变量的优先级和初始目标值。
标称值提供了一种指定模型中变量的预期模的方法。使用基于标称值的系统缩放可提高仿真的稳健性。标称值可以来自不同的来源,其中之一是模块对话框或属性检查器中的的标称值部分。有关详细信息,请参阅Modify Nominal Values for a Block Variable。
示例

带有控制器的质量-弹簧-阻尼器系统
此示例展示了一个受控的质量-弹簧-阻尼器系统。控制器调整物体上的力,使物体的位置跟踪命令信号。物体的初始速度为每秒 10 米。控制器会调整力源施加的力来跟踪输入信号的阶跃变化。

简单机械系统
此示例展示了连接旋转和平移运动的系统模型。一个叠加杠杆驱动一个负载,负载由一个质量体、粘性摩擦和一个弹簧组成,弹簧连接到叠加杠杆上的关节 C。关节 B 悬挂在两根旋转弹簧上,弹簧通过一个轮轴和一个齿轮箱与参考点相连。关节 A 通过一个齿轮箱和一个轮轴机构连接到扭矩源。
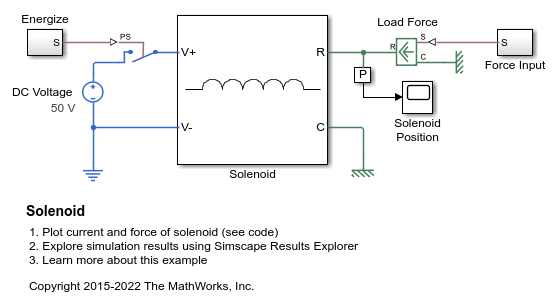
电磁铁
此示例展示了一个带有弹簧复位的电磁铁。该电磁铁被建模为一个电感,其值 L 取决于柱塞位置 x。时变电感的反电动势为:
端口
守恒
参数
扩展功能
版本历史记录
在 R2007a 中推出