四液压缸仿真
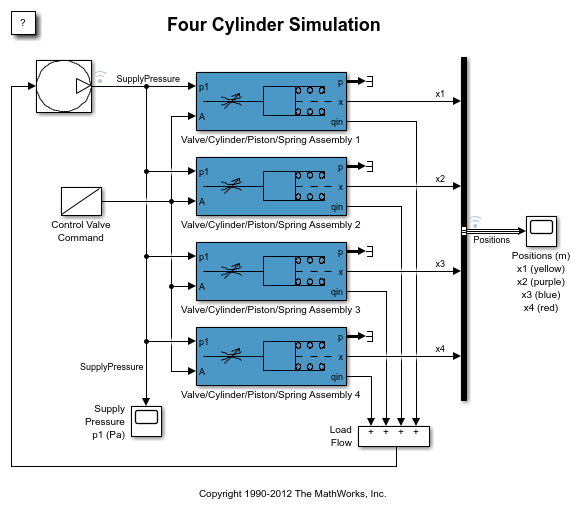
此示例说明如何使用 Simulink® 创建一个具有四个液压缸的模型。该模型有一个泵和四个作动器。每个液压缸都由相同的泵压力 p1 驱动,其流量之和就是对泵施加的负载。尽管四个控制阀中的每一个都可以独立控制,如在主动悬架系统中那样,但在此模型中所有四个控制阀都接收相同的命令,节流口面积的线性斜坡呈现从零到 0.002 sq.m。
要仿真模型,请在 Simulink 工具条上,点击运行。模型将相关数据记录到 MATLAB® 工作区的 Simulink.SimulationOutput 对象 out 中。信号记录数据存储在 out 对象中,位于名为 sldemo_hydcyl4_output 的结构体中。记录的信号有蓝色标记。有关详细信息,请参阅 可视化和访问信号记录数据。
模型参数
泵流量从 0.005 m3/sec 开始,然后在 t=0.05 sec 处下降到 0.0025 m3/sec。通过对 K、A 和 beta 采用单独的值,四个缸中的每个都表现出独特的瞬态响应。下表给出了四个作动器的特性。
---------------------------------------------------------------- Parameter | Actuator1 Actuator2 Actuator3 Actuator4 ----------------|----------------------------------------------- Spring Constant | K K/4 4K K Piston Area | Ac Ac/4 4Ac Ac Bulk Modulus | Beta Beta Beta Beta/1000 ---------------------------------------------------------------- Beta = 7e8 Pa [fluid bulk modulus] K = 5e4 N/m [spring constant] Ac = 1e-3 m^2 [cylinder cross-sectional area]
面积和弹簧常量之比对所有活塞都相同,因此活塞应具有相同的稳态输出。每个作动器子系统的主导时间常数与  成正比(从量纲分析获得的结果),因此您可以预期活塞组件 2 比组件 1 更快。活塞组件 3 预期比活塞组件 1 或 2 慢。活塞组件 4 的体积模量 beta 显著较低,如带有空气的情况,因此您可以预期活塞组件 4 比活塞组件 1 响应更迟缓。
成正比(从量纲分析获得的结果),因此您可以预期活塞组件 2 比组件 1 更快。活塞组件 3 预期比活塞组件 1 或 2 慢。活塞组件 4 的体积模量 beta 显著较低,如带有空气的情况,因此您可以预期活塞组件 4 比活塞组件 1 响应更迟缓。
结果
下列各图显示仿真期间的活塞位置和泵供应压力。


四个作动器在 t=0 处接收流量的初始冲击作为压力冲激。泵压力 p1 最初很高,随后由于四个负载的高流量需求而迅速下降。在初始瞬变期间(约 4 msec),不同响应识别每个组件单元的个体动态特性。
如参数值预测的那样,作动器 2 比作动器 1 响应更快。第三个和第四个活塞慢得多,因为它们移动相同距离需要更多工作流体。对于作动器 3,活塞由于其较大的横截面积而具有更大排量体积。对于作动器 4,尽管排量体积与作动器 1 相同,但设备需要更多流体,因为它随后被压缩。
当泵压力下降到缸内水平时,行为差异会变得模糊。各个个体响应融合成一个整体系统响应,维持各组件之间的流量平衡。在 t=0.05 sec 处,泵流量下降到接近均衡的水平,作动器流量几乎为零。个体稳态活塞位置相等,如设计所预测的那样。