Simulink.SubSystem.convertToModelReference
将子系统转换为模型
语法
说明
[ 将 tf,h] = Simulink.SubSystem.convertToModelReference(blks,mdls)blks 指定的一个或多个子系统转换为由 mdls 指定名称的模型。
对于该函数转换的每个子系统,该函数会:
创建一个模型。
将子系统的内容复制到新模型中。
更新新模型的根级输入和输出模块,以使用来自原始子系统的已编译属性。
将父模型的配置集复制到新模型,或引用与父模型相同的配置集。该转换可以更改新模型的一些配置设置,以支持将新模型用作引用模型。
适用时,该函数还:
将子系统使用的模型工作区内容从父模型复制到新模型。
将父模型使用的数据字典应用于新模型。
创建新模型所需的
Simulink.Bus对象、Simulink.Signal对象和可调参数。基于原始 Subsystem 模块的模块封装为新模型创建系统封装。系统封装不支持模块封装的某些功能,例如封装初始化代码。有关详细信息,请参阅Introduction to System Mask。
将使用 Requirements Toolbox™ 软件创建的需求链接从原始的 Subsystem 模块复制到新 Model 模块。
示例
打开并编译名为 sldemo_mdlref_conversion 的模型。为了使转换成功,包含子系统的模型必须成功编译。
mdl = "sldemo_mdlref_conversion"; open_system(mdl); set_param(mdl,SimulationCommand="Update")
模型编译时没有警告或错误。
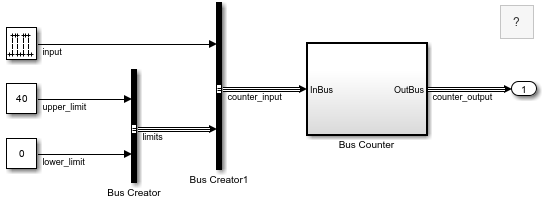
打开名为 Bus Counter 的 Subsystem 模块的模型引用转换顾问。
blk = "sldemo_mdlref_conversion/Bus Counter"; Simulink.SubSystem.convertToModelReference(blk,... UseConversionAdvisor=true);
Updating Model Advisor cache... Model Advisor cache updated. For new customizations, to update the cache, use the Advisor.Manager.refresh_customizations method.
打开并编译名为 sldemo_mdlref_conversion 的模型。为了使转换成功,包含子系统的模型必须成功编译。
mdl = "sldemo_mdlref_conversion"; open_system(mdl); set_param(mdl,SimulationCommand="Update")

模型编译时没有警告或错误。
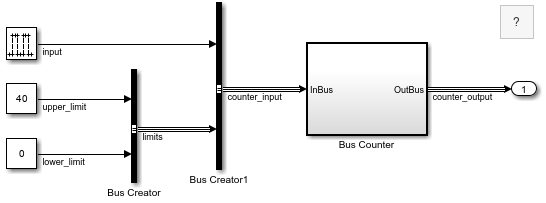
打开名为 Bus Counter 的 Subsystem 模块的模型引用转换顾问。
blk = "sldemo_mdlref_conversion/Bus Counter"; newmdl = "BusCounter"; Simulink.SubSystem.convertToModelReference(blk,newmdl);
### Successfully converted Subsystem block to Model block.
默认情况下,该函数不会用 Model 模块替换 Subsystem 模块。相反,该函数会打开新窗口,其中包含引用新模型的 Model 模块。

打开并编译名为 sldemo_mdlref_conversion 的示例模型。为了使转换成功,包含子系统的模型必须成功编译。
mdl = "sldemo_mdlref_conversion"; open_system(mdl) set_param(mdl,SimulationCommand="Update")
模型编译时没有警告或错误。
将名为 Bus Counter 的 Subsystem 模块的内容转换为名为 BusCounter 的引用模型,指定以下选项:
尽可能自动修复问题。
用引用新模型的 Model 模块替换 Subsystem 模块。
检查转换前后的仿真结果。
subsys = "sldemo_mdlref_conversion/Bus Counter"; newmdl = "BusCounter"; Simulink.SubSystem.convertToModelReference(subsys,newmdl,... AutoFix=true,ReplaceSubsystem=true,CheckSimulationResults=true);
### Successfully converted Subsystem block to Model block.

Subsystem 模块被一个 Model 模块替换,该 Model 模块引用名为 BusCounter 的模型。
对 Simulink.SubSystem.convertToModelReference 函数的一次调用可以将多个子系统转换为引用模型。
打开并编译名为 f14 的模型。为了使转换成功,包含子系统的模型必须成功编译。
mdl = "f14"; open_system(mdl) set_param(mdl,SimulationCommand="Update")

模型编译时没有警告或错误。
为转换准备模型,以消除或减少转换过程中发现的问题数量。
为了能够检查转换前后的仿真结果是否相等,请使用 Dataset 格式记录模型的输出。
set_param(mdl,SaveOutput="on",SaveFormat="Dataset")
新引用模型将从父模型继承其配置参数设置。更新 f14 模型以使用建议的信号解析设置。此设置仅支持为 Simulink.Signal 对象显式指定的信号解析。
set_param(mdl,SignalResolutionControl="UseLocalSettings")将名为 Controller 和 Aircraft Dynamics Model 的 Subsystem 模块的内容转换为引用模型,指定以下选项:
自动修复问题。
用引用新模型的 Model 模块替换 Subsystem 模块。
在转换前后检查仿真结果。
ss1 = "f14/Controller"; ss2 = "f14/Aircraft Dynamics Model"; mdl1 = "Controller"; mdl2 = "AircraftDynamics"; Simulink.SubSystem.convertToModelReference([ss1 ss2],[mdl1 mdl2],... AutoFix=true,ReplaceSubsystem=true,CheckSimulationResults=true)
### Successfully converted Subsystem block to Model block.

名为 Controller 和 Aircraft Dynamics Model 的 Subsystem 模块被分别引用名为 Controller 和 AircraftDynamics 的模型的 Model 模块替换。