trim
找到动态系统的平衡点
trim 函数仅提供基本的配平功能。要获得完整的配平功能,请使用 Simulink® Control Design™ 软件。有关详细信息,请参阅Compute Steady-State Operating Points (Simulink Control Design)。
语法
说明
trim 函数采用序列二次规划算法从初始点开始搜索,直到找到最接近的平衡点为止。您必须隐式或显式提供初始点。如果 trim 函数找不到平衡点,它将返回搜索过程中遇到的状态导数在极小化极大意义上最接近零的点。换句话说,该函数返回与导数的零点之间的最大偏差最小时的点。trim 函数可以查找满足特定输入、输出或状态条件的平衡点,还可以查找系统按指定方式变化时的点,即,系统的状态导数等于特定非零值时的点。
小心
当您使用 trim 函数在指定的初始工作点附近查找平衡点,则 trim 函数仅返回一个局部值。但可能存在其他更合适的平衡点。要找到某个特定应用情况下最适合的平衡点,最好多尝试几个初始状态、输入和输出值的初始估计值。
示例
打开名为 EquilibriumPoints 的示例模型,该模型使用 State-Space 模块对线性状态空间系统进行建模。
sys = "EquilibriumPoints";
open_system(sys)
State-Space 模块指定以下矩阵:
A = [-0.09 -0.01;1 0]B = [0 -7;0 -2]C = [0 2;1 -5]D = [-3 0; 1 0]
要在模型中找到一个均衡点,请调用 trim 函数并只指定模型名称作为输入参量。
[x,u,y,dx,options] = trim(sys)
x = 2×1
0
0
u = 2×1
0
0
y = 2×1
0
0
dx = 2×1
0
0
options = 1×18
0 0.0001 0.0001 0.0000 0 0 1.0000 0 0 7.0000 2.0000 0 2.0000 500.0000 0 0.0000 0.1000 1.0000
Simulink® trim 函数使用模型来确定动态系统中满足指定的输入、输出和状态条件的稳定状态点。
打开名为 SteadyStatePoints 的示例模型。
sys = "SteadyStatePoints";
open_system(sys)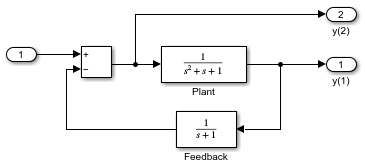
要求出导致两个输出值都为 1 的输入值和状态值,请使用 trim 函数。
创建名为 x 和 u 的变量,分别存储表示状态变量值和输入值的初始估计值。然后,创建一个名为 y 的变量来存储所需的输出值。
x = [0; 0; 0]; u = 0; y = [1; 1];
创建索引变量来指定哪些变量固定,哪些变量可变。要指定状态值和输入值可变,请将空矩阵 ([]) 赋给索引变量 ix 和 iu。要指定输出值固定,请将索引变量 iy 的值指定为 [1;2]。
ix = []; % Don't fix any of the states iu = []; % Don't fix the input iy = [1;2]; % Fix both output 1 and output 2
要求出得到所需输出值的状态值和输入值,请调用 trim 函数。由于存在舍入误差,trim 函数返回的值可能不同。
[x,u,y,dx] = trim(sys,x,u,y,ix,iu,iy)
x = 3×1
-0.0000
1.0000
1.0000
u = 2
y = 2×1
1.0000
1.0000
dx = 3×1
10-15 ×
0.1110
-0.0000
-0.1110
均衡点问题可能没有解。在这种情况下,trim 函数首先尝试将导数设置为 0,然后返回使得与所需结果的最大偏差最小的解。
打开名为 EquilibriumPoints 的示例模型,该模型使用 State-Space 模块对线性状态空间系统进行建模。
sys = "EquilibriumPoints";
open_system(sys)
State-Space 模块指定以下矩阵:
A = [-0.09 -0.01;1 0]B = [0 -7;0 -2]C = [0 2;1 -5]D = [-3 0; 1 0]
要在由状态值和输入值定义的工作点附近找到一个均衡点,请调用 trim 函数,并指定包含状态值和输入值的附加输入参量来定义该工作点。
x0 = [1;1]; u0 = [1;1]; [x,u,y,dx,options] = trim(sys,x0,u0)
x = 2×1
10-13 ×
-0.2337
-0.2353
u = 2×1
0.3333
-0.0000
y = 2×1
-1.0000
0.3333
dx = 2×1
10-13 ×
0.8233
-0.0051
options = 1×18
0 0.0001 0.0001 0.0000 0 0 1.0000 1.0000 0 31.0000 6.0000 0 2.0000 500.0000 0 0.0000 0.1000 1.0000
检查 options 返回参量,查看确定指定工作点附近的均衡点所需的迭代次数。
options(10)
ans = 31
要找到一个两个输出值都是固定值的均衡点,请指定附加输入参量以指示目标输出值并指定输出值是固定的。
y = [1;1]; iy = [1;2]; [x,u,y,dx] = trim(sys,[],[],y,[],[],iy)
x = 2×1
0.0009
-0.3075
u = 2×1
-0.5383
0.0004
y = 2×1
1.0000
1.0000
dx = 2×1
10-16 ×
0.0043
0.4196
要找到一个具有指定导数值且两个输出都固定的均衡点,请为导数值、目标输出值指定附加输入参量,且指定输出值是固定的。
y = [1;1]; iy = [1;2]; dx = [0;1]; idx = [1;2]; [x,u,y,dx,options] = trim(sys,[],[],y,[],[],iy,dx,idx)
x = 2×1
0.9752
-0.0827
u = 2×1
-0.3884
-0.0124
y = 2×1
1.0000
1.0000
dx = 2×1
-0.0000
1.0000
options = 1×18
0 0.0001 0.0001 0.0000 0 0 1.0000 0 0 13.0000 3.0000 0 2.0000 500.0000 0 0.0000 0.1000 1.0000
检查 options 返回参量,查看确定指定工作点附近的均衡点所需的迭代次数。
options(10)
ans = 13
输入参数
输出参量
详细信息
算法
trim 函数采用序列二次规划算法来查找平衡点。有关此算法的描述,请参阅序列二次规划 (SQP) (Optimization Toolbox)。
版本历史记录
在 R2006a 之前推出
另请参阅
findop (Simulink Control Design)
主题
- Compute Steady-State Operating Points (Simulink Control Design)