ADIS16505 IMU Sensor
Measure acceleration, angular rate, and temperature along axes of ADIS16505 sensor
Since R2024a
Libraries:
Simulink Support Package for Arduino Hardware /
Sensors
Description
Add-On Required: This feature requires the Simulink Support Package for Arduino Hardware add-on.
The ADIS16505 IMU Sensor block outputs the values of acceleration, angular rate, and temperature along x-, y- and z- axes as measured by the ADIS16505 IMU Sensor connected to Arduino board.
Note
The output from the ADIS16505 sensor may have a finite non-negligible offset value
except for the Temperature output. You may consider correcting this offset value for
such cases.
If you simulate a model that contains the ADIS16505 IMU Sensor block without connecting it to the hardware, the block outputs zeros. For more information, see Block Produces Zeros or Does Nothing in Simulation.
Ports
Output
Parameters
Enter the pin number on the Arduino® board to which the sensor chip select pin is connected. See Pin Mapping for Arduino Timer-Independent Blocks to know the SS pin restriction with different Arduino boards.
Select the logic level for INT1 pin as Active high
or Active low.
Enter the desired output data rate between 1 Hz to
2000 Hz, at which accelerometer data has to be
sampled.
Accelerometer data output rate in Hz is determined by the following calculation.
Achieved output data rate = 2000/(1+DEC_RATE), where
DEC_RATE is 0,1,2,...1999.
Depending on the desired output data rate specified on the block mask,
Achieved output data rate (Hz) will be set on the sensor.
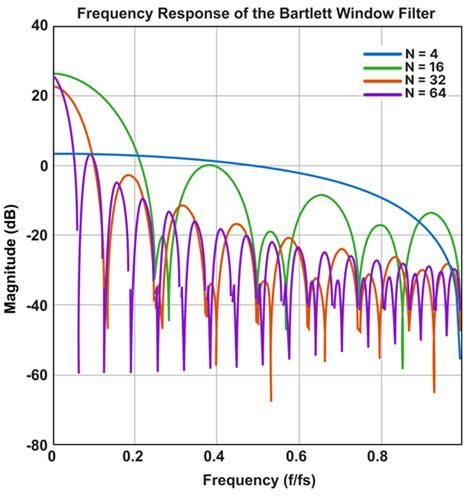
Select the number of taps for Bartlett window filter.
Click Frequency response based on number of taps to view the frequency response of Bartlett filter. A sample screen is shown below.
Specify the datatype for acceleration, angular rate, and temperature outputs.
Specify the number of samples that the block outputs.
The value that you specify here is also used to compute the output sample time:
Output sample time = Samples per frame *
Sample time.
Specify how often the block read values from the sensor, in seconds. When you
specify this parameter as -1, Simulink® determines the best sample time for the block based on the block
context within the model. The output sample time is the product of
Samples per frame and Sample
time that you specify.
Select outputs
When you select the Acceleration (m/s^2) parameter, the Acceleration port becomes available. For more information on the Acceleration port, see Acceleration.
When you select the Angular velocity (rad/s) parameter, the Angular Rate port becomes available. For more information on the Angular Rate port, see Angular Rate.
When you select the Temperature (deg C) parameter, the Temperature port becomes available. For more information on the Temperature (deg C) port, see Temperature.
Select this parameter to display the status of read operation.
When you select the Status parameter, the Status port becomes available. For more information on the Status port, see Status.
Select this parameter to set Timestamp as one of the output ports. For more information on the Timestamp port, see Timestamp.
Version History
Introduced in R2024a