Flight Simulation Simulink Template for Parrot Minidrone
You can use the Flight Simulation Simulink® template to create a model to simulate a drone's behavior. After you are satisfied with the simulation, you can deploy the model on the Parrot® minidrone hardware. This template is designed to spin the two clockwise propellers and the two counterclockwise propellers for 2 seconds each. You can update this template to add different logic.
Open the Flight Simulation Template
At the MATLAB® command prompt, type
simulink.On the Simulink Start Page, navigate to Simulink Support Package for Parrot Minidrones, and select Flight Simulation Template.
Specify a name for the project. A new Simulink model named
slQuadcopteropens. This model is configured for flight simulation.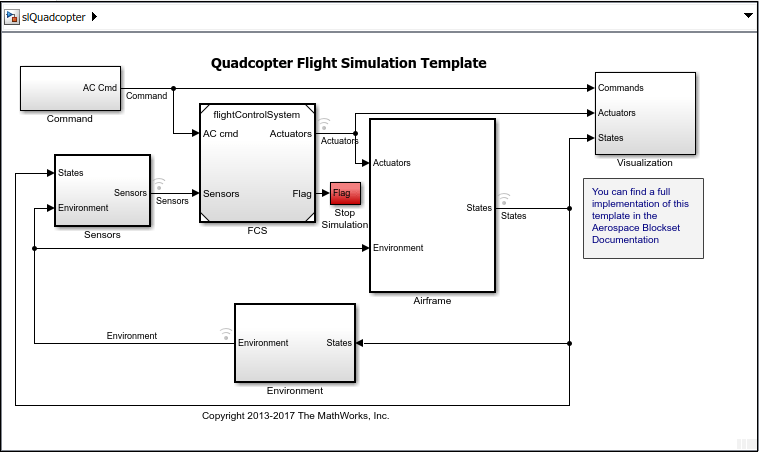
The
slQuadcoptermodel contains theFCS(Flight Control System) subsystem, which takes input values from the different sensors on the drone and provides output signals to the motors based on the logic in theEstimatorandControllersubsystems.
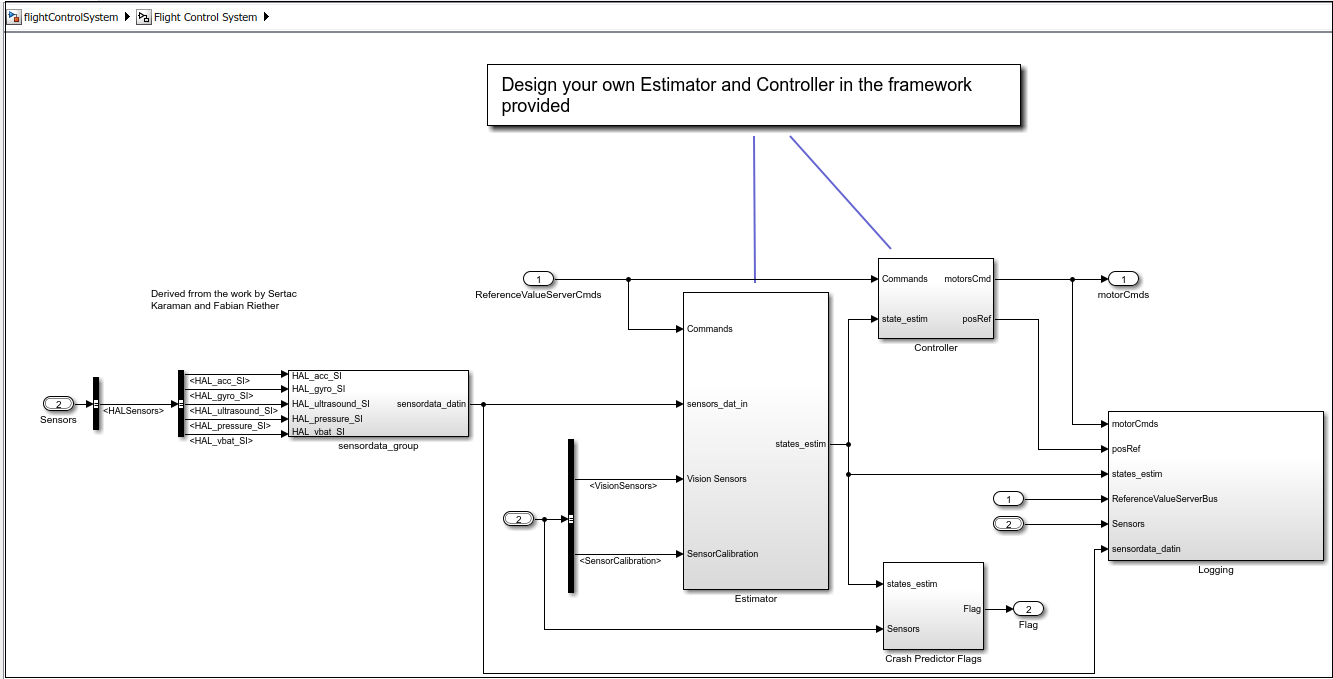
You can modify the logic inside Estimator and
Controller subsystems to create your own model to fly the
Parrot minidrone.
Deploy the Flight Simulation Template and Start the Motors
The procedure to deploy the Flight Simulation template and start the motors are the same as for the Code Generation template (see Setting Up the Hardware and Deploying the Model and Using the Flight Control Interface to Start the Drone).
See Also
Code Generation Simulink Template for Parrot Minidrone | Fly a Parrot Minidrone Using the Quadcopter Simulink Model