Bevel Gear Constraint
Kinematic constraint between two bevel gear bodies with angled intersecting rotation axes

Libraries:
Simscape /
Multibody /
Gears and Couplings /
Gears
Description
The Bevel Gear Constraint block represents a kinematic constraint between two gear bodies with intersecting rotation axes held at a specified angle. The base and follower frame ports identify the connection frames on the gear bodies. The gear rotation axes coincide with the connection frame z-axes. The gears rotate at a fixed velocity ratio determined by the gear pitch radii.

The block represents only the kinematic constraint characteristic to a bevel gear system. Gear inertia and geometry are solid properties that you must specify using solid blocks. The gear constraint model is ideal. Backlash and gear losses due to Coulomb and viscous friction between teeth are ignored. You can, however, model viscous friction at joints by specifying damping coefficients in the joint blocks.
Gear Geometry
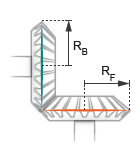
The bevel gear constraint is parameterized in terms of the dimensions of the gear
pitch circles. The pitch circles are imaginary circles concentric with the gear
bodies and tangent to the tooth contact point. The pitch radii, labeled
RB and
RF in the figure, are the outer
radii that the gears would have if they were reduced to friction cones in mutual
contact.
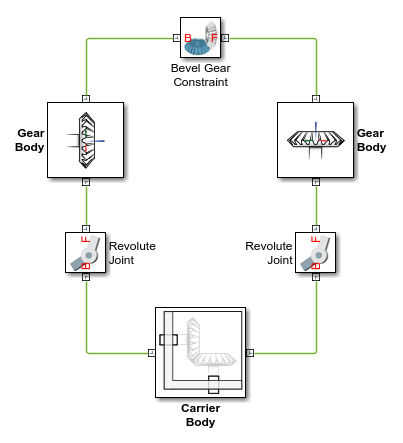
Gear Assembly
Gear constraints occur in closed kinematic loops. The figure shows the closed-loop topology of a simple bevel gear model. Joint blocks connect the gear bodies to a common fixture or carrier, defining the maximum degrees of freedom between them. A Bevel Gear Constraint block connects the gear bodies, eliminating one degree of freedom and effectively coupling the gear motions.
Assembly Requirements
The block imposes special restrictions on the relative positions and orientations of the gear connection frames. The restrictions ensure that the gears assemble only at distances and angles suitable for meshing. The block enforces the restrictions during model assembly, when it first attempts to place the gears in mesh, but relies on the remainder of the model to keep the gears in mesh during simulation.
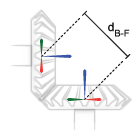
Position Restrictions
The distance between the base and follower frame origins must be such that, at the given shaft angle and pitch radii, the gear pitch circles are tangent to each other. This distance, denoted dB-F, follows from the law of cosines:
where RB is the pitch radius of the base gear, RF is the pitch radius of the follower gear, and θShaft is the intersection angle between the rotation axes.
The distance between the base and follower frame origins along the z-axis of the base frame, denoted ΔzB, must be equal to:
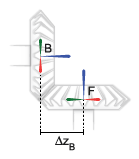
The distance between the base and follower frame origins along the z-axis of the follower frame, denoted ΔzF, must be equal to:
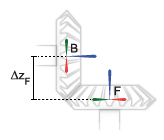
Orientation Restrictions
The imaginary lines extending from the base and follower z-axes must intersect at the shaft angle set in the block dialog box. The angle is denoted θB-F in the figure. If the Shaft Axes parameter is set to
Perpendicular, the angle is 90°.
Examples
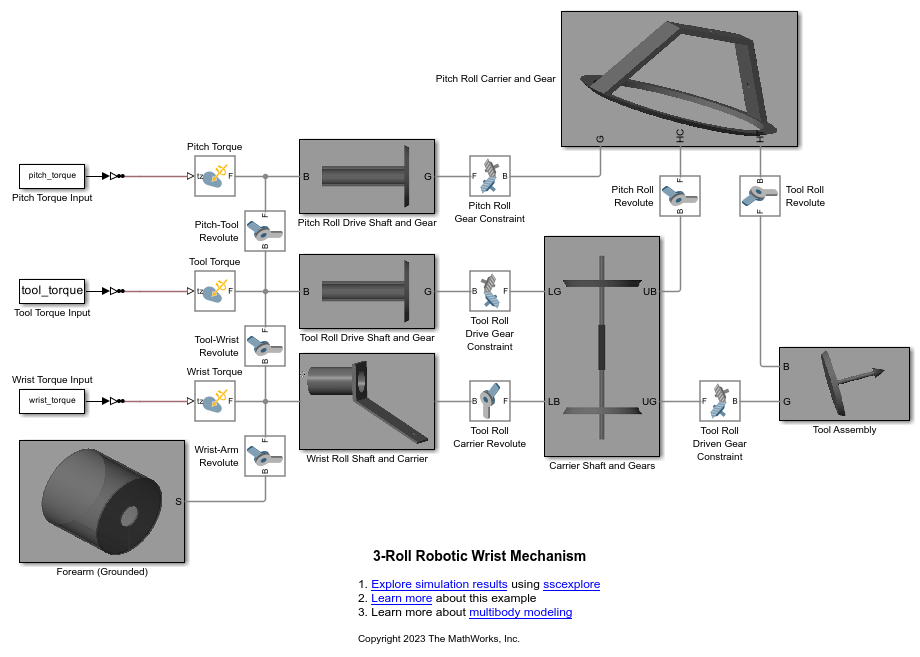
3-Roll Robotic Wrist Mechanism
Models a 3-Roll robotic wrist mechanism based on the Cincinnati-Milacron 3-roll wrist mechanism. The mechanism uses three bevel gear pairs to rotate the tool about 3 independent axes. The tip of the tool moves along the surface of a sphere and can be rotated about an axis that passes through the center of that sphere (drilling action). In this example, precomputed torques are applied to the three drive shafts to achieve a certain trajectory (on the surface of the sphere) of the tool tip. Drilling is performed at different points along the trajectory.
Ports
Frame
Output
Parameters
Extended Capabilities
Version History
Introduced in R2013b