simscape.multibody.RigidBody Class
Namespace: simscape.multibody
Superclasses: simscape.multibody.Component
Description
Use an object of the simscape.multibody.RigidBody class to construct a
rigid body. A RigidBody object is a hierarchical container and has a tree
structure composed of rigidly connected frames and component objects.
By default, a newly created RigidBody object contains only one frame called
reference. The reference frame serves as the root of
the tree structure. You must explicitly add frames or component objects to a
RigidBody object, and the new frame or component object must be rigidly
connected to the tree structure of the RigidBody object. Note that the name
of every frame or component object must be unique among the frames and objects at the same
hierarchical level of the RigidBody object.
In a larger system, to connect to other frames or component objects, a
RigidBody object must have at least one connector. By default, a newly
created RigidBody object has zero connectors, and adding frames or component
objects to a RigidBody object does not automatically create connectors. To add
a connector, use the addConnector method.
Note that you can add connectors only to the frames at the top level of the
RigidBody object, and each frame can only have one connector.
See More About section for more information
about the RigidBody class.
The simscape.multibody.RigidBody class is a handle class.
Class Attributes
Sealed | true |
ConstructOnLoad | true |
HandleCompatible | true |
RestrictsSubclassing | true |
For information on class attributes, see Class Attributes.
Creation
Description
rb = simscape.multibody.RigidBodysimscape.multibody.RigidBody object.
Properties
Methods
Examples
This example shows how to create a link that has a rectangular shape with two end frames.
To avoid typing the namespace name for the classes, you can use the import function.
import simscape.Value simscape.op.* simscape.multibody.*;
Create a
simscape.multibody.RigidBodyobject to construct a rigid body named link. By default, the newly created object has one frame.
link = RigidBody
link =
RigidBody:
No connectors.
Frames:
Frame Parent Source Connector?
___________ ______ ______ __________
"reference" -- -- No
No components.
RigidBody with properties:
FrameNames: "reference"
ComponentNames: [0×1 string]
DoVisualize: 1
FrameConnectors: [0×1 string]
To create the body of the link, you can use the
simscape.multibody.Solidclass. The body has a rectangular shape whose length, width, and height are10cm,1cm, and1cm, respectively. The length is in thex-direction of the local reference frame. The body is made of aluminum and has the red color.
body = Solid(Brick(Value([10 1 1],"cm")),UniformDensity(Value(2700,"kg/m^3")),SimpleVisualProperties([1 0 0]));
To add the body to the reference frame of the
linkobject, use theaddComponentmethod.
addComponent(link,"Body","reference",body);
To add a frame to each end of the link, you can use the
addFramemethod. The frames are named asneg_endandpos_end, respectively.
length = Value(10,"cm"); offset = length/2; addFrame(link,"neg_end","reference",RigidTransform(StandardAxisTranslation(offset,Axis.NegX))); addFrame(link,"pos_end","reference",RigidTransform(StandardAxisTranslation(offset,Axis.PosX)));
To be able to connect the link to other bodies or joints, the link needs to have connectors. To add connectors to the end frames, you can use the
addConnectormethod.
addConnector(link,"neg_end"); addConnector(link,"pos_end");
To see the components in the
linkobject, you can type:
link
link =
RigidBody:
Connectors:
Name Type
_________ _____
"neg_end" Frame
"pos_end" Frame
Frames:
Frame Parent Source Connector?
___________ ___________ ______ __________
"reference" -- -- No
"neg_end" "reference" Trans Yes
"pos_end" "reference" Trans Yes
Components:
Name Type Frame Connector
______ _____ ___________ _________
"Body" Solid "reference" "R"
RigidBody with properties:
FrameNames: [3×1 string]
ComponentNames: "Body"
DoVisualize: 1
FrameConnectors: [2×1 string]
This example shows how to add a frame, solid, and sub-rigid body to a rigid body.
To avoid typing the namespace name for the classes, you can use the
importfunction.
import simscape.multibody.*;Create a
simscape.multibody.RigidBodyobject namedrb. Therbobject has one frame calledreferenceand no connectors.
rb = RigidBody
rb =
RigidBody:
No connectors.
Frames:
Frame Parent Source Connector?
___________ ______ ______ __________
"reference" -- -- No
No components.
RigidBody with properties:
FrameNames: "reference"
ComponentNames: [0×1 string]
DoVisualize: 1
FrameConnectors: [0×1 string]
To add frames to the
referenceframe, create and add frames to a rigid transform object. First, create asimscape.multibody.RigidTransformobject namedrt. Thertobject represents a translation along the positive y-axis of the base frame. The distance of the translation is50cm.
rt = RigidTransform(StandardAxisTranslation(simscape.Value(50,"cm"),Axis.PosY));Then, use the
addFramemethod to add two frames,faandfb, to thereferenceframe through thertobject.
addFrame(rb,"fa","reference",rt); addFrame(rb,"fb","reference",rt);
You can view the tree structure of the
rbobject by using theplotStructuremethod.
plotStructure(rb);
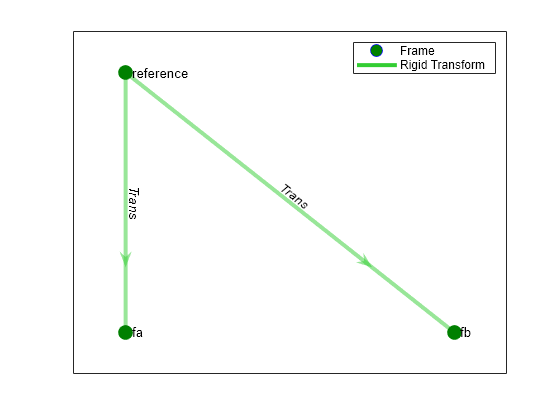
The green vertexes represent the frames, and the green lines represent the rigid transforms between the frames. The arrows indicate the orientations of the rigid transforms. By default, a rigid transform maps vectors from the new frame to the parent frame.
Add a
simscape.multibody.Solidobject to therbobject. First, create asimscape.multibody.Solidobject calledsphere. Thesphereobject represents a solid with a spherical shape. The sphere has a radius of50cm.
sphere = Solid(Sphere(simscape.Value(50,"cm")));Then, use the addComponent method to add the sphere object to the fa frame. By default, a Solid object has one connector that you can connect to the rb object.
addComponent(rb,"sphere","fa",sphere);
Use the plotStructure method to show the tree structure of the rb object in a new figure.
figure plotStructure(rb);
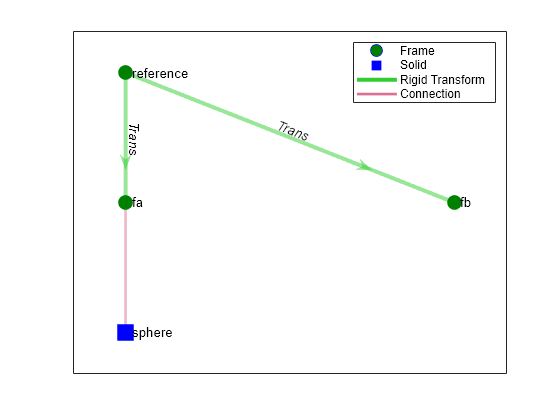
The blue vertex represents the sphere object, and the pink link indicates the connection between the fa frame and the sphere object.
Add a
RigidBodyobject to therbobject as a subbody. Create an emptyRigidBodyobject calledsubrband add two new frames,f1andf2, to thesubrbobject through thertobject.
subrb = RigidBody; addFrame(subrb,"f1","reference",rt); addFrame(subrb,"f2","reference",rt);
Because the subrb object has zero connectors, you must add at least one connector to the object. Use the addConnector method to add a connector to the f1 frame of the subrb object. The connector and frame have the same name.
addConnector(subrb,"f1");Use the addComponent method to attach the subrb object to the fb frame through the f1 connector.
addComponent(rb,"subrb","fb",subrb,"f1");
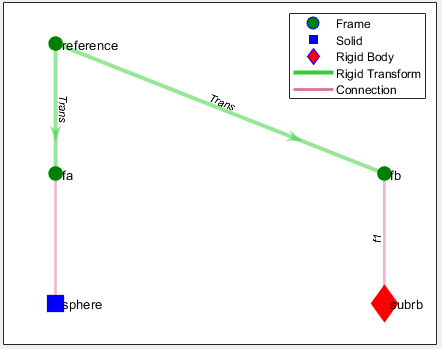
Use the plotStructure method to show the tree structure of the rb object in a new figure.
figure plotStructure(rb);

The red vertex represents the subrb object, and the pink line indicates the connection between the fb frame and the f1 connector of the subrb object.
More About
To display the tree structure of a RigidBody object, use the plotStructure method.
The figure shows the top-level structure of a RigidBody object.
The vertexes represent frames and component objects within the RigidBody
object. A green vertex is the frame, a blue vertex is a
simscape.multibody.Solid object, and a red vertex is a
simscape.multibody.RigidBody object. The reference frame serves as the root
of the tree structure. See the Examples section to learn how to add
a frame or component object to a RigidBody object.
Version History
Introduced in R2022a