PMSM Field-Oriented Control
永磁同步电机磁场定向控制
库:
Simscape /
Electrical /
Control /
PMSM Control
描述
PMSM Field-Oriented Control 模块实现永磁同步电机 (PMSM) 的磁场定向控制结构。磁场定向控制 (FOC) 是一种高性能的 AC 电机控制策略,它通过将静止相电流转换到旋转参考系来解耦转矩和磁通。当转子转速和位置已知,且应用需要以下特性时,请使用 FOC:
启动时具有高扭矩和低电流。
高效率。
方程
PMSM FOC 结构利用转子 d-q 参考系来解耦转矩和磁通。下图显示了模块的整体架构。
在图中:
ω 和 ωref 分别是测得角速度和参考角速度。
Tref 是参考电磁转矩。
i 和 v 是定子电流和电压,下标 d 和 q 分别表示 d 轴和 q 轴,下标 a、b 和 c 表示三个定子绕组。
θe 是转子电角。
G 是栅极脉冲,下标 H 和 L 分别表示高和低,下标 a、b 和 c 表示三个定子绕组。
您可以使用控制模式参数来选择实现速度控制或转矩控制。模块按照与图中完全相同的方式实现速度控制。模块通过删除 Velocity Controller 模块并直接接受参考转矩来实现转矩控制。
假设
电机参数已知。
限制
控制结构使用单一采样率实现。
示例
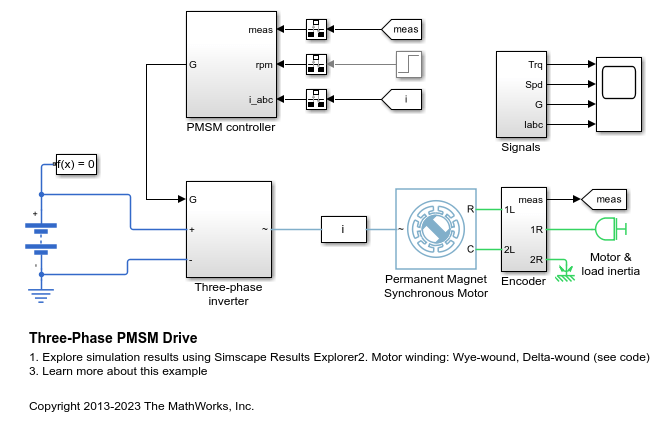
三相 PMSM 驱动建模
此示例展示了一个采用星型绕组和三角型绕组配置的永磁同步电机 (PMSM),以及一个适用于典型混合动力车辆的逆变器。该逆变器直接连接到车辆电池,但您也可以在两者之间实现一个 DC-DC 转换器阶段。使用该模型,通过选择架构和增益来设计 PMSM 控制器,从而实现期望的性能。为了检查 IGBT 开通和关断时序,请使用更详细的 N-Channel IGBT 模块替换 IGBT 器件。对于整车建模,请使用 Motor & Drive (System Level) 模块,以基于能量的模型来抽象 PMSM、逆变器和控制器。
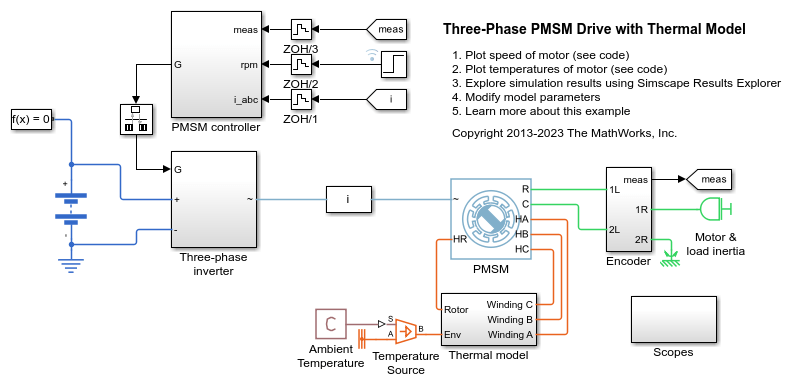
包含热模型的三相 PMSM 驱动
此示例展示了一个永磁同步电机 (PMSM) 以及一个适用于典型混合动力车辆的逆变器。该 PMSM 包含热模型和经验铁损。该逆变器直接连接到车辆电池,但您也可以在两者之间实现一个 DC-DC 转换器阶段。您可以使用此模型设计 PMSM 控制器,通过选择架构和增益来实现期望的性能。定子绕组和转子的初始温度设置为 25 摄氏度。环境温度为 27 摄氏度。Scopes 子系统包含示波器,可用于查看仿真结果。

控制带开放端绕组的三相 PMSM 的速度
此示例展示了如何控制带开放端绕组的内置式永磁同步电机 (IPMSM) 中的转子角转速。高压电池通过两个受控三相转换器为 IPMSM 供电。IPMSM 根据负载以电机模式和发电模式运行。理想转矩源提供负载。Scopes 子系统包含示波器,可用于查看仿真结果。Control 子系统包含一个基于 PI 的磁场定向控制结构。在时长一秒的仿真过程中,角速度需求为 0 rpm、500 rpm、2000 rpm,然后是 3000 rpm。
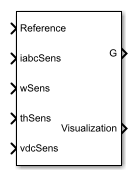
端口
输入
输出
参数
参考
[1] Bernardes, T., V. F. Montagner, H. A. Gründling, and H. Pinheiro. "Discrete-time sliding mode observer for sensorless vector control of permanent magnet synchronous machine." IEEE Transactions on Industrial Electronics. Vol. 61, Number 4, 2014, pp. 1679–1691.
[2] Carpiuc, S., and C. Lazar. "Fast real-time constrained predictive current control in permanent magnet synchronous machine-based automotive traction drives." IEEE Transactions on Transportation Electrification. Vol.1, Number 4, 2015, pp. 326–335.
[3] Haque, M. E., L. Zhong, and M. F. Rahman. "Improved trajectory control for an interior permanent magnet synchronous motor drive with extended operating limit." Journal of Electrical & Electronics Engineering. Vol. 22, Number 1, 2003, p. 49.
[4] Yang, N., G. Luo, W. Liu, and K. Wang. "Interior permanent magnet synchronous motor control for electric vehicle using look-up table." In 7th International Power Electronics and Motion Control Conference. Vol. 2, 2012, pp. 1015–1019.
扩展功能
版本历史记录
在 R2017b 中推出