平均值斩波器控制
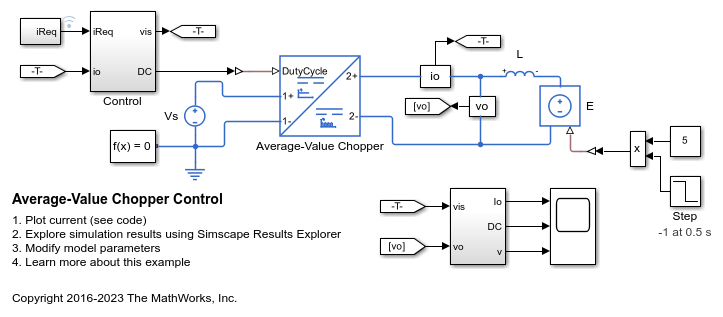
此示例展示了如何控制四象限斩波器。Control 子系统实现一种基于 PI 的简单控制算法来控制输出电流。平均值斩波器模型用于加快仿真速度。仿真同时使用正参考值和负参考值。总仿真时间 (t) 为 1 秒。在 t = 0.5 秒时,负载 DC 电源 E 的极性发生变化。
模型
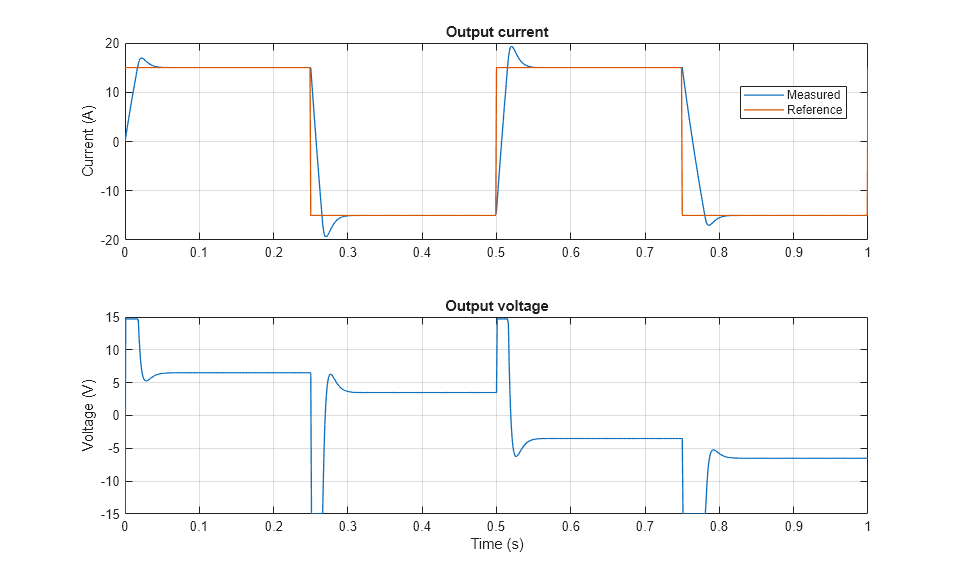
来自 Simscape 记录的仿真结果
下图显示了测试中的请求电流和测得电流,以及电路中的输出电压。
实时仿真结果
此示例已在配备 Intel®3.5 GHz i7 多核 CPU 的 Speedgoat Performance 实时目标计算机上进行了测试。该模型可以采用 10 微秒的步长实时运行。