Pre-Parameterized Stepper Motor Block Validation
This example demonstrates and validates a set of predefined parameterizations that are supplied with the Simscape™ Electrical™ Stepper Motor block. These predefined parameterizations are determined from manufacturer datasheets.
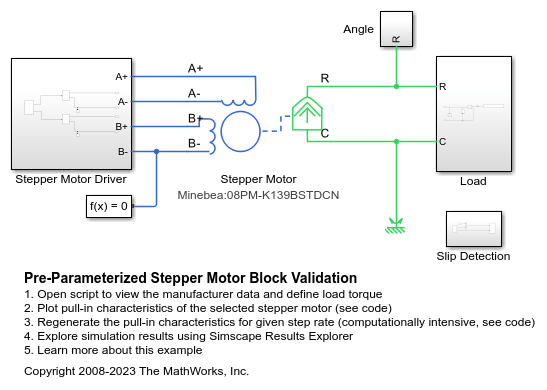
Test Harness
First the particular stepper motor to be modeled must be selected. To do this, open the stepper motor block dialog and click on Select a predefined parameterization. This opens the Block Parameterization Manager from which you select the stepper part and apply it to the block. Based on the part you select, this script then loads the corresponding data that was used to parameterize the part, including pull-in curves from the original datasheet. The test harness works by gradually increasing the load until slip occurs for each step rate demand tested. Slip detection is implemented in the Slip Detection subsystem and uses a Simulink® assertion block that checks the difference between expected and actual rotor angle.
Simulated Results and Datasheet Pull-in Torque Characteristics
The plot below shows the simulated pull-in characteristics of one of the parameterized stepper motor options, along with the curve given in the manufacturer datasheet. Achieving an exact match for the pull-in characteristics can be challenging, a key factor being that most datasheets do not specify the test conditions used. Engineering judgment and simplifying assumptions are used to fill in for missing data. As a result deviations between simulated and actual physical behavior are to be expected. To ensure requisite accuracy, following initial parameterization from a test harness like this, the next step is to validate simulated behavior against experimental data and to refine component models as necessary.

For any given stepper motor, the set of model parameter values that matches the pull-in torque characteristics is often not unique. To ensure the parameterization is representative, it is good practice to also generate the pullout curve and compare it with the curve given in the datasheet.
To learn more about parameterizing a stepper motor refer to example StepperMotorPullIn.