Serial Receive
Read data from UART or USART port on PX4 flight controller
Libraries:
UAV Toolbox Support Package for PX4 Autopilots
Description
Add-On Required: This feature requires the UAV Toolbox Support Package for PX4 Autopilots add-on.
The Serial Receive block reads data from the Universal Asynchronous Receiver Transmitter (UART) port or the Universal Synchronous and Asynchronous Receiver Transmitter (USART) port on the PX4® flight controller.
The block reads the values from the specified UART or USART port, and outputs the received values as a N-by-1 array. The properties for each port for serial communication are mentioned in the Configuration Parameters dialog box in Simulink® (go to Configuration Parameters > Hardware Implementation > /dev/tty* pane).
During the external mode simulation, the block outputs the results from the executable running on the target hardware.
During Normal mode simulation, the block outputs zeroes.
During Connected I/O simulation, this block reads data from the specified serial port of the hardware.
You can choose to read data in blocking or non-blocking mode. For more information, see Partially receive data from serial port and Receive data from serial port.
Note
If you are using Cube Orange autopilot, then use GPS2 for serial data
communication, as there might be issues using TELEM1 or
TELEM2 ports.
Examples
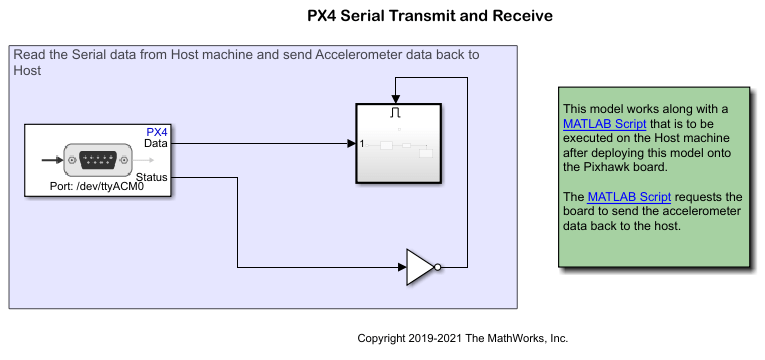
Getting Started with Serial Receive and Serial Transmit Blocks
Get and send serial data to PX4 autopilot using Serial Receive and Serial Transmit blocks.
Ports
Output
Parameters
Main Tab
Enter the name of the UART or USART port on the board from which the block reads data. To view the mapping between UART/USART ports and the labels on the Pixhawk flight controller, see Serial Port Names and Corresponding Labels on PX4 Flight Controller Boards.
Select the data type in which the block receives data from the UART or USART port.
Specify the length of data that you want to receive at each sample time.
Specify how often the block reads data from the UART port. When you specify this
parameter as-1, Simulink determines the best sample time for the
block based on the block context within the model.
Advanced Tab
on— When you select this parameter, the read operation runs in the Blocking mode. The read operation is blocked while waiting for the requested data to be available. If data is available, theDataport outputs data. If data is not available, theDataport waits for data.A task overrun occurs if the target hardware is still waiting for the data to be available when the next read operation is scheduled to begin.
To fix overruns:
Increase the time step by using the Sample time parameter.
Reduce the length of data requested by using the Data length (N) parameter.
off— When you clear this parameter, the read operation runs in the Non-blocking mode. When reading data, if data is not available, theDataport outputs zeroes. TheStatusport outputs32, indicating that no new data is available.
Specify the amount of time that the block waits for the data during each time step, if the Wait until data received parameter is selected. If timeout occurs, the read operation is aborted.
Dependencies
This parameter appears only when you select the Wait until data received parameter.
on— When you select this parameter, theDataport outputs partially received data at the sample time.off— When you clear this parameter, theDataport waits for the next sample time so that the data for the whole Data Length (N) is received, and then only provides the output.
Dependencies
This parameter is visible only if the Wait until data received option is unchecked (non-blocking mode). For more information, see Partially receive data from serial port.
Partially receive data from serial port
This example describes the values at the Length output port when the
length of the messages received is less than, greater than, or equal to the length of
requested data. This section explains the values at the output ports, with Data
type set to uint8 and Data size (N) set
to 4 in non-blocking mode with the Output partially received
data option checked.
Length of data received = Data length (N): The
Dataport outputs the message as a data vector of the size specified in the Data size (N) parameter.Suppose that the Data size (N) parameter specified is 4 and the length of the message received is also 4.
In this case, the
Dataport outputs a data vector of size 4 filled with the data bytes of the message, and theLengthport outputs4.
Length of data received < Data length (N): The
Dataport outputs the message as a data vector of the size specified in the Data size (N) parameter. All the empty spaces in the vector are filled with zeroes.Suppose that the Data size (N) parameter specified is 4 and the length of data received is 3 bytes.
In this case, the
Dataport outputs a data vector of size 4. The first three data bytes in the vector are the bytes from the received message; the remaining space is filled with zero. TheLengthport outputs3.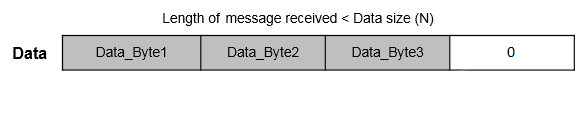
Length of data received > Data length (N): The
Dataport outputs a data vector of the size specified in the Data size (N) parameter. The vector contains only the first N data bytes from the message. The remaining data bytes are left in the buffer.Suppose that the Data length (N) parameter specified is 4 and the length of data received is 5 bytes. In this case, the port outputs a data vector of size 4. The vector contains only the first 4 bytes from the received data. The remaining data byte is left in the buffer. The
Lengthport outputs4.
Receive data from serial port
This example describes the values at the Status output port when the
length of the messages received is less than, greater than, or equal to the length of
requested data. This section explains the values at the output ports, with Data
type set to uint8 and Data size (N) set
to 4 in blocking and non-blocking modes.
Length of data received = Data length (N): The
Dataport outputs the message as a data vector of the size specified in the Data size (N) parameter.Suppose that the Data size (N) parameter specified is 4 and the length of the message received is also 4.
In this case, for both blocking and non-blocking modes, the
Dataport outputs a data vector of size 4 filled with the data bytes of the message, and theStatusport outputs0.Length of data received < Data length (N): The
Dataport outputs the message as a data vector of the size specified in the Data size (N) parameter. All the empty spaces in the vector are filled with zeroes.Suppose that the Data size (N) parameter specified is 4 and the length of data received is 3 bytes.
For non-blocking mode, the
Dataport outputs a data vector of size 4. The first three data bytes in the vector are the bytes from the received message. The remaining space is filled with zero. TheStatusport outputs1.For blocking mode, the block waits till all the data bytes are received within the time specified in the
Timeoutparameter. If the fourth data byte is not received within the timeout, theDataoutputs zeroes, and theStatusport outputs1. The three received data bytes are left in the buffer.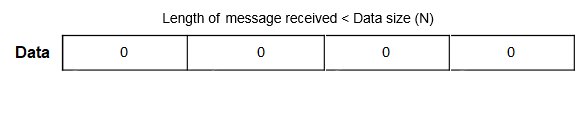
Length of data received > Data length (N): The
Dataport outputs a data vector of the size specified in the Data size (N) parameter. The vector contains only the first N data bytes from the message. The remaining data bytes are left in the buffer.Suppose that the Data length (N) parameter specified is 4 and the length of data received is 5 bytes. In this case, for both blocking and non-blocking modes, the port outputs a data vector of size 4. The vector contains only the first 4 bytes from the received data. The remaining data byte is left in the buffer. The
Statusport outputs zero.
Version History
Introduced in R2018b