controllerVFH3D
Description
The controllerVFH3D
System object™ enables a UAV to avoid obstacles, based on sensor data, by using 3D vector field
histograms (3DVFH). The object computes an obstacle-free direction using the sensor-data-based
positions of obstacles, the UAV position, the UAV orientation, and the target position.
controllerVFH3D uses the 3DVFH+ algorithm [1] to compute an obstacle-free
direction.
To find an obstacle-free direction:
Create the
controllerVFH3Dobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
vfh3D = controllerVFH3Dvfh3D, that computes a desired direction, a
desired yaw, and a status output using the 3DVFH+ algorithm.
vfh3D = controllerVFH3D(Name=Value)
Properties
Usage
Syntax
Description
[
finds an obstacle-free direction and yaw, using the 3DVFH+ algorithm, for the input UAV
position, UAV orientation, sensor-data-based positions of obstacles, and target position.
This syntax also returns the status desiredDirection,desiredYaw,status] = vhf3D(position,orientation,obstaclePoints,targetPosition)status of the obstacle-free
direction.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Create a controllerVFH3D object.
vfh3D = controllerVFH3D;
Create obstacles.
az = [-60:-20 20:60]*(pi/180); el = (-30:30)*(pi/180); [El,Az] = meshgrid(el,az);
Specify the distances of the obstacles from the sensor, and convert to Cartesian coordinates.
obstacleDist = linspace(15,20,numel(El(:))); [xSensor,ySensor,zSensor] = sph2cart(Az(:),El(:),obstacleDist');
Align the sensor and histogram frames.
vfh3D.SensorOrientation = [-180 0 0];
Specify the sensor range limits.
vfh3D.DistanceLimits = [0.2 25];
Specify the current UAV position and orientation, the locations of obstacles, and the target position for the UAV.
uavPosition = [0; 0; 0]; uavOrientation = [1; 0; 0; 0]; sensorPoints = [xSensor ySensor zSensor]; targetPosition = [20; 0; 0];
Compute an obstacle-free direction and desired yaw for the UAV, and return the status of the obstacle-free direction.
[desiredDirection,desiredYaw,status] = vfh3D(uavPosition, ... uavOrientation, ... sensorPoints, ... targetPosition);
Visualize the default histogram of the calculated direction.
show(vfh3D)
axis equal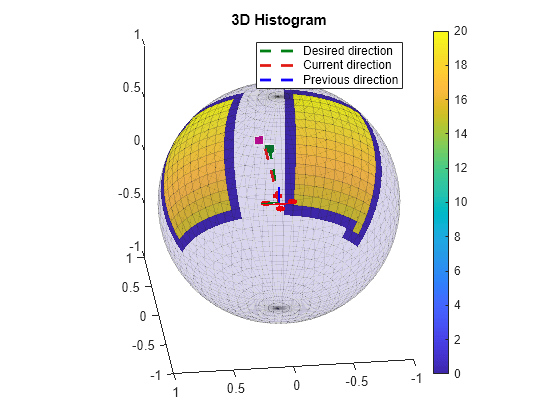
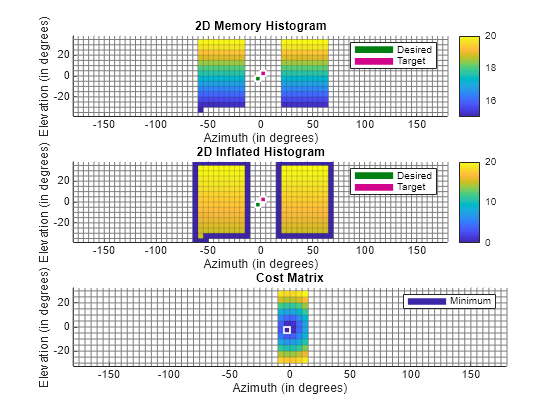
Visualize the 2D memory histogram, 2D inflated histogram, and cost matrix.
figure ax(1) = subplot(3,1,1); ax(2) = subplot(3,1,2); ax(3) = subplot(3,1,3); show(vfh3D, ... Parent=ax, ... PlotsToShow=["2D Memory Histogram","2D Inflated Histogram","Cost Matrix"]) axis(ax,"equal") xlim(ax,"tight")
References
[1] Baumann, Tanja. “Obstacle Avoidance for Drones Using a 3DVFH* Algorithm.” Master's thesis, Eidgenössische Technische Hochschule Zürich, 2018.
Extended Capabilities
Version History
Introduced in R2022b