uavDubinsConnection
Dubins path connection for UAV
Description
The uavDubinsConnection object holds information for computing
a uavDubinsPathSegment path
segment to connect start and goal poses of a UAV.
A UAV Dubins path segment connects two poses as a sequence of motions in the north-east-down coordinate system.
The motion options are:
Straight
Left turn (counterclockwise)
Right turn (clockwise)
Helix left turn (counterclockwise)
Helix right turn (clockwise)
No motion
The turn direction is defined as viewed from the top of the UAV. Helical motions are used to ascend or descend.
Use this connection object to define parameters for a UAV motion model, including the
minimum turning radius and options for path types. To generate a path segment between poses
using this connection type, call the connect
function.
Creation
Properties
Object Functions
connect | Connect poses with UAV Dubins connection path |
Examples
This example shows how to calculate a UAV Dubins path segment and connect poses using the uavDubinsConnection object.
Create a uavDubinsConnection object.
connectionObj = uavDubinsConnection;
Define start and goal poses as [x, y, z, headingAngle] vectors.
startPose = [0 0 0 0]; % [meters, meters, meters, radians]
goalPose = [0 0 20 pi];Calculate a valid path segment and connect the poses. Returns a path segment object with the lowest path cost.
[pathSegObj,pathCosts] = connect(connectionObj,startPose,goalPose);
Show the generated path.
show(pathSegObj{1})
Display the motion type and the path cost of the generated path.
fprintf('Motion Type: %s\nPath Cost: %f\n',strjoin(pathSegObj{1}.MotionTypes),pathCosts);Motion Type: R L R N Path Cost: 138.373157
This example shows how to modify an existing uavDubinsPathSegment object.
Connect Poses Using UAV Dubins Connection Path
Create a uavDubinsConnection object.
connectionObj = uavDubinsConnection;
Define start and goal poses as [x, y, z, headingAngle] vectors.
startPose = [0 0 0 0]; % [meters, meters, meters, radians]
goalPose = [0 0 20 pi];Calculate a valid path segment and connect the poses. Returns a path segment object with the lowest path cost.
[pathSegObj,pathCosts] = connect(connectionObj,startPose,goalPose);
Show the generated path.
show(pathSegObj{1})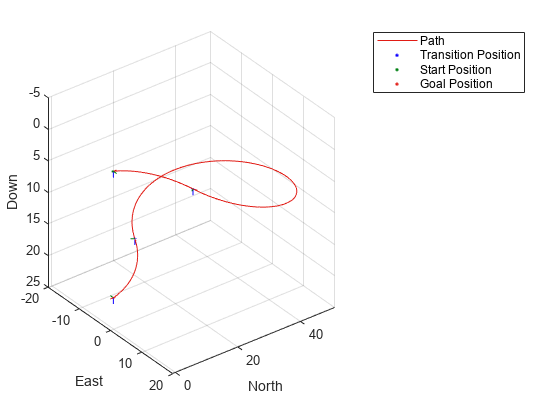
Verify the motion type and the path cost of the returned path segment.
fprintf('Motion Type: %s\nPath Cost: %f\n',strjoin(pathSegObj{1}.MotionTypes),pathCosts);Motion Type: R L R N Path Cost: 138.373157
Modify Connection Type and Properties
Disable this specific motion sequence in a new connection object. Specify the AirSpeed, MaxRollAngle, and FlightPathAngleLimit properties of the connection object.
connectionObj = uavDubinsConnection('DisabledPathTypes',{'RLRN'}); connectionObj.AirSpeed = 15; connectionObj.MaxRollAngle = 0.8; connectionObj.FlightPathAngleLimit = [-1.47 1.47];
Connect the poses again to get a different path. Returns a path segment object with the next lowest path cost.
[pathSegObj,pathCosts] = connect(connectionObj,startPose,goalPose);
Show the modified path.
show(pathSegObj{1})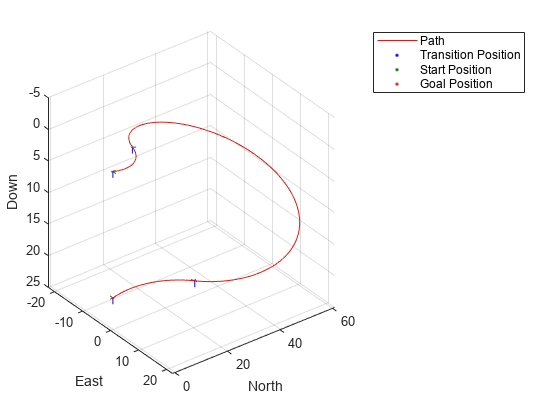
Verify the motion type and the path cost of the modified path segment.
fprintf('Motion Type: %s\nPath Cost: %f\n',strjoin(pathSegObj{1}.MotionTypes),pathCosts);Motion Type: L R L N Path Cost: 164.674067
References
[1] Owen, Mark, Randal W. Beard, and Timothy W. McLain. "Implementing Dubins Airplane Paths on Fixed-Wing UAVs." Handbook of Unmanned Aerial Vehicles, 2015, pp. 1677–1701.
Extended Capabilities
Version History
Introduced in R2019b