Acceleration and Braking
Libraries:
Vehicle Dynamics Blockset /
Vehicle Scenarios /
Drive Cycle and Maneuvers
Description
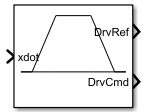
The Acceleration and Braking block generates a straight reference trajectory as a function of longitudinal displacement or time. Initial reference acceleration and deceleration are tunable. Once the target longitudinal velocity is achieved, the block executes a deceleration signal. This deceleration signal can be executed either with specified time or longitudinal displacement.
An additional option for fault tracking allows you to monitor the uniformity of parameters just before braking. The default set values are upper bounds for the standard split-mu test (ISO Standard 141512).
Ports
Input
Output
Driver reference data, returned as a bus containing these block values.
| Signal | Description | Units |
|---|---|---|
| Longitudinal reference velocity | m/s |
| Lateral reference displacement | m |
| Vehicle global longitudinal reference position | m |
| Vehicle global lateral reference position | m |
| Vehicle global yaw reference position | rad |
| Reference path curvature | 1/m |
| Reference path curvature gradient | 1/m^2 |
Data Types: bus
Driver reference data, returned as a bus containing these block values.
| Signal | Description | Units | |
|---|---|---|---|
|
| Boolean signal used to override driver model steering commands | one |
| Handwheel angle | one | |
| Boolean signal used to override driver model steering commands
with zero when value is | one | |
| Boolean signal used to hold the current driver model steering
output when | one | |
|
| Boolean signal used to override driver model acceleration commands | one |
| Normalized accelerator input | one | |
| Boolean signal used to hold the current driver model acceleration
output when | one | |
| Boolean signal used to override driver model acceleration
commands with zero when value is | one | |
|
| Boolean signal used to override driver model deceleration commands | one |
| Normalized decelerator or brake input. | one | |
| Boolean signal used to hold the current driver model deceleration
output when | one | |
| Boolean signal used to override driver model deceleration
commands with zero when value is | one | |
| Normalized handbrake or park brake input | one | |
|
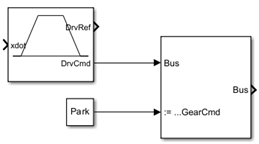
| Command to specify the transmission mode | one |
| Command to specify manual gear number or automatic transmission shifter position | one | |
| Command to upshift | one | |
| Command to downshift | one | |
| Normalized clutch open command for manual transmissions | one | |
Note
By default, the TransCmd bus is not actively used. Use a
Bus Assignment block to override the
TransCmd bus to customize and extend the scenario.
Data Types: bus