Simulation 3D Actor Transform Set
Set actor translation, rotation, scale
Libraries:
Vehicle Dynamics Blockset /
Vehicle Scenarios /
Sim3D /
Sim3D Core
Aerospace Blockset /
Animation /
Simulation 3D
Simulink 3D Animation /
Simulation 3D /
Utilities
Description
Note
Simulating models with the Simulation 3D Actor Transform Set block requires Simulink® 3D Animation™.
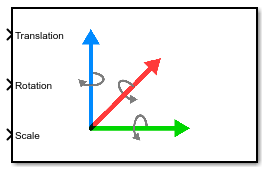
The Simulation 3D Actor Transform Set block sets the actor translation, rotation, and scale in the 3D visualization environment.
The block uses a vehicle-fixed coordinate system that is initially aligned with the inertial world coordinate system.
| Axis | Description |
|---|---|
| X | Forward direction of the vehicle Roll — Right-handed rotation about X-axis |
| Y | Extends to the right of the vehicle, initially parallel to the ground plane Pitch — Right-handed rotation about Y-axis |
| Z | Extends upwards Yaw — Left-handed rotation about Z-axis |
Actors are scene objects that support 3D translation, rotation, and scale. Parts are actor components. Components do not exist by themselves; they are associated with an actor.
Tip
Verify that the Simulation 3D Actor Transform
Set block executes before the Simulation 3D Scene Configuration
block. That way, Simulation 3D Actor Transform Set prepares the signal data
before the Unreal Engine® 3D visualization environment receives it. To check the block execution order,
right-click the blocks and then click the Properties button ![]() . On the General tab, confirm these
Priority settings:
. On the General tab, confirm these
Priority settings:
Simulation 3D Scene Configuration —
0Simulation 3D Actor Transform Set —
-1
For more information about execution order, see Control and Display Execution Order.
Examples
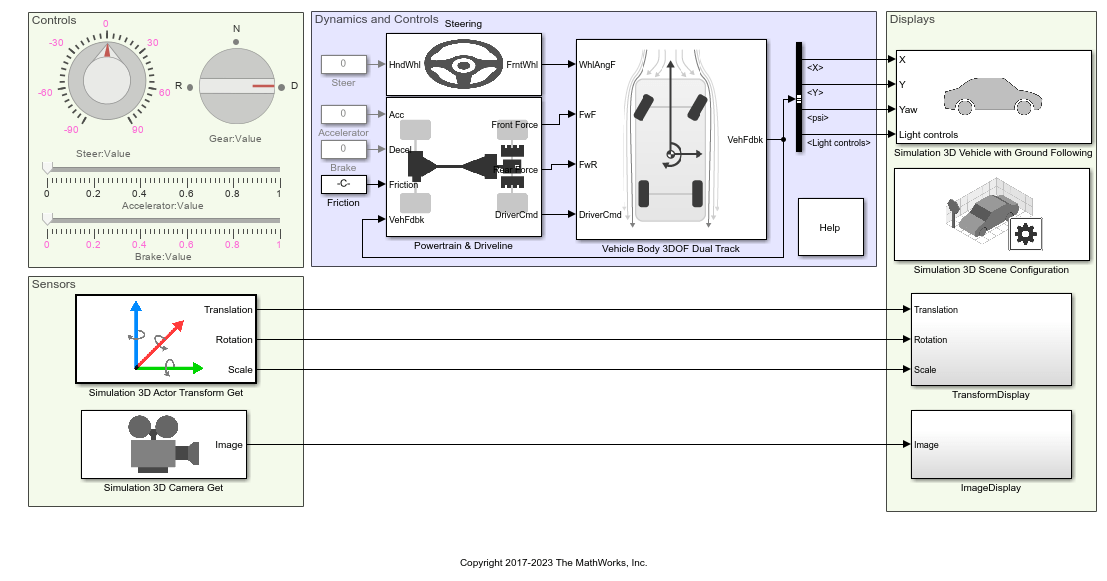
Scene Interrogation with Camera and Ray Tracing Reference Application
Interrogate a 3D Unreal Engine scene with a vehicle dynamics model by using a camera and ray tracing reference application project.