readFrame
Read Velodyne point cloud from file
Syntax
Description
ptCloud = readFrame(veloReader)pointCloud object.
ptCloud = readFrame(veloReader,frameNumber)
ptCloud = readFrame(veloReader,frameTime)frameTime.
[
returns the timestamps for all points in the point cloud using any combination of
input arguments from previous syntaxes.ptCloud,pointTimestamps] = readFrame(___)
[
returns the positional information for each point cloud frame.ptCloud,pointTimestamps,positionData] = readFrame(___)
Examples
Create a velodyneFileReader object to read a Velodyne® packet capture (PCAP) file and select specific point clouds using a duration scalar.
Read in point clouds by using a Velodyne® file reader. Specify the PCAP file to read and the Velodyne® device model.
veloReader = velodyneFileReader('lidarData_ConstructionRoad.pcap','HDL32E');
Create a duration scalar that represents one second after the first point cloud reading.
timeDuration = veloReader.StartTime + duration(0,0,1,Format='s');Read the first point cloud recorded at or after the given time duration.
ptCloudObj = readFrame(veloReader,timeDuration);
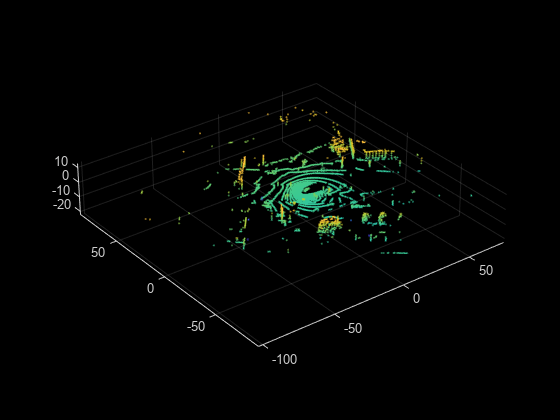
Display the point cloud using pcshow.
figure pcshow(ptCloudObj)
Input Arguments
Output Arguments
References
[1] Velodyne LiDAR, Inc. "HDL-32E User Manual." 63-9113 Rev. M, 2018.