vision.TemplateMatcher
Locate template in image
Description
To locate a template in an image.
Create the
vision.TemplateMatcherobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
tMatcher = vision.TemplateMatchertMatcher. This object performs template
matching by shifting a template in single-pixel increments throughout the interior of an
image.
tMatcher = vision.TemplateMatcher(Name,Value)tMatcher = vision.TemplateMatcher('Metric','Sum of
absolute differences')
Properties
Usage
Syntax
Description
location = tMatcher(I,T)I, and the
template matrix, T. The object computes the location by shifting
the template in single-pixel increments throughout the interior of the image.
[returns
the location of the best template match location,numberOfValues,numValid] = tMatcher(I,T,ROI)location, the metric values
around the best match numberOfValues, and a logical flag
numValid. This applies when you set the OutputValue property to 'Best match location' and the
BestMatchNeighborhoodOutputPort property to
true.
[
also returns a logical flag, location,numberOfValues,numValid,ROIvalid] = tMatcher(I,T,ROI)ROIvalid to indicate whether the
ROI is outside the bounds of the input image
I. This applies when you set the OutputValue property to 'Best match location', and the
BestMatchNeighborhoodOutputPort, ROIInputPort, and ROIValidityOutputPort properties to true.
[also
returns a logical flag location,ROIvalid] = tMatcher(I,T,ROI)ROIvalid indicating if the specified
ROI is outside the bounds of the input image
I. This applies when you set the OutputValue property to 'Best match location', and both
the ROIInputPort and ROIValidityOutputPort properties to true.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object™ as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
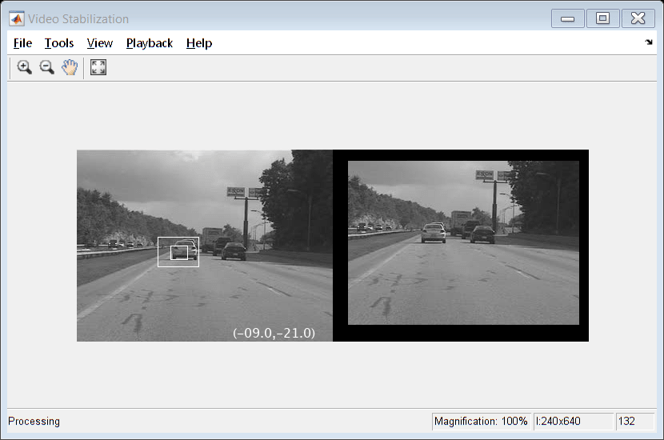
This example shows how to remove the effect of camera motion from a video stream.
Introduction
In this example we first define the target to track. In this case, it is the back of a car and the license plate. We also establish a dynamic search region, whose position is determined by the last known target location. We then search for the target only within this search region, which reduces the number of computations required to find the target. In each subsequent video frame, we determine how much the target has moved relative to the previous frame. We use this information to remove unwanted translational camera motions and generate a stabilized video.
Initialization
Create a System object™ to read video from a multimedia file. We set the output to be of intensity only video.
% Input video file which needs to be stabilized. filename = "shaky_car.avi"; hVideoSource = VideoReader(filename);
Create a template matcher System object to compute the location of the best match of the target in the video frame. We use this location to find translation between successive video frames.
hTM = vision.TemplateMatcher("ROIInputPort", true, ... "BestMatchNeighborhoodOutputPort", true);
Create a System object to display the original video and the stabilized video.
hVideoOut = vision.VideoPlayer("Name", "Video Stabilization"); hVideoOut.Position(1) = round(0.4*hVideoOut.Position(1)); hVideoOut.Position(2) = round(1.5*(hVideoOut.Position(2))); hVideoOut.Position(3:4) = [650 350];
Here we initialize some variables used in the processing loop.
pos.template_orig = [109 100]; % [x y] upper left corner pos.template_size = [22 18]; % [width height] pos.search_border = [15 10]; % max horizontal and vertical displacement pos.template_center = floor((pos.template_size-1)/2); pos.template_center_pos = (pos.template_orig + pos.template_center - 1); W = hVideoSource.Width; % Width in pixels H = hVideoSource.Height; % Height in pixels BorderCols = [1:pos.search_border(1)+4 W-pos.search_border(1)+4:W]; BorderRows = [1:pos.search_border(2)+4 H-pos.search_border(2)+4:H]; sz = [W, H]; TargetRowIndices = ... pos.template_orig(2)-1:pos.template_orig(2)+pos.template_size(2)-2; TargetColIndices = ... pos.template_orig(1)-1:pos.template_orig(1)+pos.template_size(1)-2; SearchRegion = pos.template_orig - pos.search_border - 1; Offset = [0 0]; Target = zeros(18,22); firstTime = true;
Stream Processing Loop
This is the main processing loop which uses the objects we instantiated above to stabilize the input video.
while hasFrame(hVideoSource) input = im2gray(im2double(readFrame(hVideoSource))); % Find location of Target in the input video frame if firstTime Idx = int32(pos.template_center_pos); MotionVector = [0 0]; firstTime = false; else IdxPrev = Idx; ROI = [SearchRegion, pos.template_size+2*pos.search_border]; Idx = hTM(input,Target,ROI); MotionVector = double(Idx-IdxPrev); end [Offset, SearchRegion] = updatesearch(sz, MotionVector, ... SearchRegion, Offset, pos); % Translate video frame to offset the camera motion Stabilized = imtranslate(input, Offset, "linear"); Target = Stabilized(TargetRowIndices, TargetColIndices); % Add black border for display Stabilized(:, BorderCols) = 0; Stabilized(BorderRows, :) = 0; TargetRect = [pos.template_orig-Offset, pos.template_size]; SearchRegionRect = [SearchRegion, pos.template_size + 2*pos.search_border]; % Draw rectangles on input to show target and search region input = insertShape(input, "rectangle", [TargetRect; SearchRegionRect],... "Color", "white"); % Display the offset (displacement) values on the input image txt = sprintf("(%+05.1f,%+05.1f)", Offset); input = insertText(input(:,:,1),[191 215],txt,"FontSize",16, ... "TextColor", "white", "BoxOpacity", 0); % Display video hVideoOut([input(:,:,1) Stabilized]); end
Conclusion
Using the Computer Vision Toolbox™ functionality from MATLAB® command line it is easy to implement complex systems like video stabilization.
Appendix
The following helper function is used in this example.
Algorithms
Typical use of the template matcher involves finding a small region within a larger image. The region is specified by the template image which can be as large as the input image, but which is typically smaller than the input image.
The object outputs the best match coordinates, relative to the top-left corner of the
image. The [x
y] coordinates of the location correspond to the center of the template.
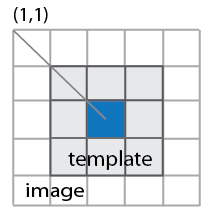
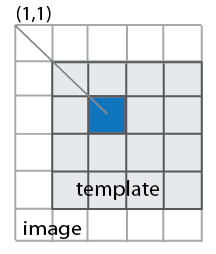
When you use a template with an odd number of pixels, the object uses the center of the
template. When you use a template with an even number of pixels, the object uses the centered
upper-left pixel for the location. The following table shows how the object outputs the
location (LOC), of odd and even templates:
| Odd number of pixels in template | Even number of pixels in template |
|---|---|
 |  |
Extended Capabilities
Version History
Introduced in R2012a
See Also
opticalFlowHS | opticalFlowLKDoG | opticalFlowLK | opticalFlowFarneback | insertMarker