worldpointset
Manage 3-D to 2-D point correspondences
Description
The worldpointset object stores correspondences between 3-D world
points and 2-D image points across camera views. You can use a worldpointset
object with an imageviewset object
to manage image and map data for structure-from-motion, visual odometry, and visual
simultaneous localization and mapping (SLAM).
Creation
Syntax
Description
wpSet = worldpointset
Properties
This property is read-only.
3-D world points, specified as an M-by-3 matrix with rows containing [x y z] world points. M is the number of 3-D world points.
This property is read-only.
Identifiers for views associated with world points, specified as an N-element row vector of integers.
This property is read-only.
Identifiers for 3-D points in WorldPoints, specified as an
M-element row vector of integers.
This property is read-only.
3-D to 2-D point correspondences, specified as a three-column table.
| Column | Description |
|---|---|
PointIndex | Each row contains the linear index of a world point. |
ViewId | Each row contains a 1-by-N vector specifying the IDs of the views associated with the corresponding world points. N is the number of views associated with the world point. |
FeatureIndex | Each row contains a 1-by-N vector specifying the
indices of the feature points that correspond to the world point. Each element
is the index of the feature point in the view specified by the corresponding
element in the ViewID cell. |
This property is read-only.
Mean viewing direction of each world point, specified as an
M-by-3 matrix, where M is the number of points.
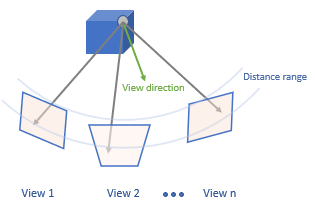
The viewing direction provides an estimate for a view angle from which a 3-D point can
be observed. The mean viewing direction is the average of all the unit vectors pointing
from the world point to the camera centers of the associated views. When a new camera
view is introduced into the system, the 3-D world points that can potentially be
observed in this view can be predicted based on the range set by the distance limits and
the ViewingDirection.
This property is read-only.
An representing the minimum and maximum distances from which each world point is observed.
Distance limits for 3-D point observation, specified as an M-by-2
vector that represents the minimum and maximum distance, where M is
the number of points. The range indicates how far the 3-D point can be observed. When a
new camera view is introduced into the system, the 3-D world points that can potentially
be observed in this view can be predicted based on the range set by the distance limits
and the ViewingDirection.
This property is read-only.
View IDs of the representative views, specified as an M-element column vector, where M is the number of points. The representative view corresponds to the view that contains the representative feature in the representative view for each world point. A representative feature is the medoid of all the feature descriptors associated with the world point.
This property is read-only.
Representative feature descriptor index, specified as an M-element column vector, where M is the number of points. The index value corresponds to the view that contains the representative feature descriptor for each world point.
This property is read-only.
Number of 3-D world points, specified as a scalar.
Object Functions
addWorldPoints | Add world points to world point set |
removeWorldPoints | Remove world points from world point set |
updateWorldPoints | Update world points in world point set |
selectWorldPoints | Select world points from world point set |
addCorrespondences | Update world points in a world point set |
removeCorrespondences | Remove 3-D to 2-D correspondences from world point set |
updateCorrespondences | Update 3-D to 2-D correspondences in world point set |
updateLimitsAndDirection | Update distance limits and viewing direction |
updateRepresentativeView | Update representative view ID and corresponding feature index |
findViewsOfWorldPoint | Find views that observe a world point |
findWorldPointsInTracks | Find world points that correspond to point tracks |
findWorldPointsInView | Find world points observed in view |
Examples
Load a MAT file containing stereo parameters into the workspace.
load('webcamsSceneReconstruction.mat');Read a stereo pair of images into the workspace.
I1 = imread('sceneReconstructionLeft.jpg'); I2 = imread('sceneReconstructionRight.jpg');
Undistort the images.
I1 = undistortImage(I1,stereoParams.CameraParameters1); I2 = undistortImage(I2,stereoParams.CameraParameters2);
Define a rectangular region of interest (ROI), in the format [x y width height].
roi = [30 30 size(I1,2)-30 size(I1,1)-30];
Detect and extract SIFT features from both images using the ROI.
imagePoints1 = detectSIFTFeatures(im2gray(I1),ROI=roi); imagePoints2 = detectSIFTFeatures(im2gray(I2),ROI=roi); [feature1,validPoints1] = extractFeatures(im2gray(I1),imagePoints1); [feature2,validPoints2] = extractFeatures(im2gray(I2),imagePoints2);
Match the extracted features to each other.
indexPairs = matchFeatures(feature1,feature2,MatchThreshold=10,Unique=true);
Compute the 3-D world points.
matchedPoints1 = validPoints1(indexPairs(:,1)); matchedPoints2 = validPoints2(indexPairs(:,2)); worldPoints = triangulate(matchedPoints1,matchedPoints2,stereoParams);
Create a worldpointset object to manage correspondences.
wpSet = worldpointset;
Add the world points to the worldpointset.
[wpSet,newPointIndices] = addWorldPoints(wpSet,worldPoints);
Add the 3-D to 2-D point correspondences to the worldpointset.
wpSet = addCorrespondences(wpSet,1,newPointIndices,indexPairs(:,1)); wpSet = addCorrespondences(wpSet,2,newPointIndices,indexPairs(:,2));
Display the world points.
pcshow(wpSet.WorldPoints,VerticalAxis="y",VerticalAxisDir="down",MarkerSize=45)