Simulink CAN 通信快速入门
此示例说明如何在 Simulink® 中使用 MathWorks® 虚拟 CAN 通道来设置 CAN 报文的传输和接收。虚拟通道以环回配置形式连接。
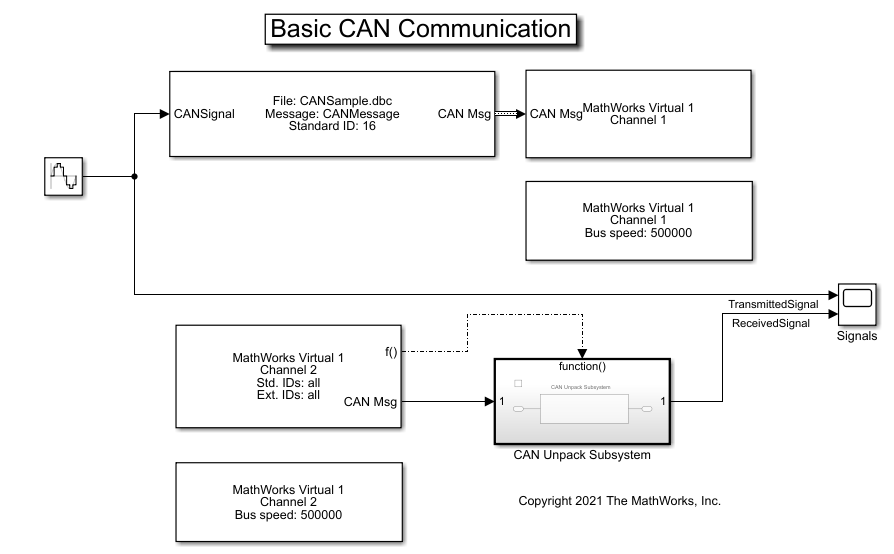
Vehicle Network Toolbox™ 提供了 Simulink 模块,用于通过 Simulink 模型在使用控制器局域网 (CAN) 格式的网络上传输和接收实时报文。此示例使用 CAN Configuration、CAN Pack、CAN Transmit、CAN Receive 和 CAN Unpack 模块通过 CAN 总线执行数据传输。
传输和接收 CAN 报文
创建一个模型以传输和接收携带正弦波数据信号的 CAN 报文。该模型在每个时间步传输一条报文。DBC 文件定义模型中使用的报文和信号。
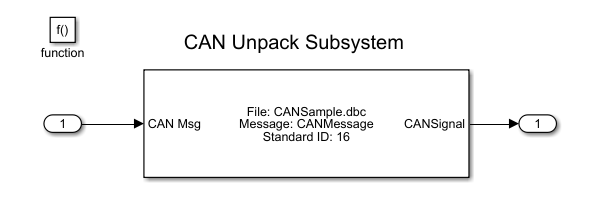
处理 CAN 报文
CAN Receive 模块在任何特定时间步接收到新报文时,都会生成一个函数调用触发信号。这会通知模型中的其他模块,有一条报文需要解码。信号解码和处理在Function-Call Subsystem (Simulink)内执行。
可视化信号数据
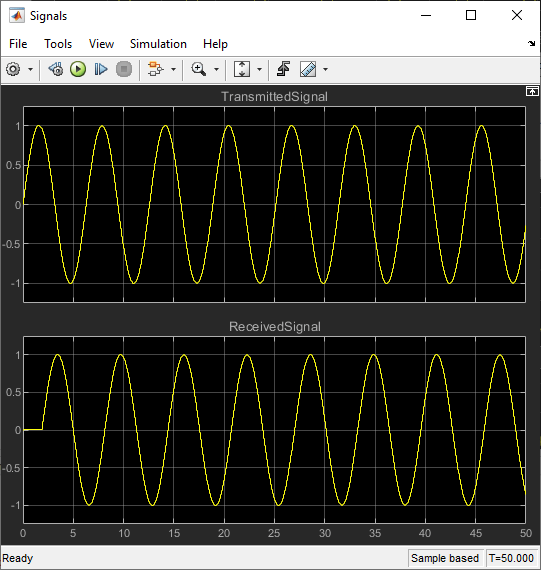
绘制传输之前和之后的正弦波值。X 轴对应于仿真时间步,Y 轴对应于信号的值。两个图之间的相移表示信号在网络中传播时的传播延迟。
扩展示例
此示例使用 MathWorks 虚拟 CAN 通道。您可以将模型连接到其他支持的硬件。您还可以将模型修改为以周期性速率传输。