Simulink 周期性 CAN 报文传输行为
此示例说明如何使用 MathWorks® 虚拟 CAN 通道在 Simulink® 中设置 CAN 报文的周期性传输和接收。虚拟通道以环回配置形式连接。
Vehicle Network Toolbox™ 提供了 Simulink 模块,用于通过 Simulink 模型在控制器局域网 (CAN) 上传输和接收实时报文。此示例使用 CAN Configuration、CAN Pack、CAN Transmit、CAN Receive 和 CAN Unpack 模块通过 CAN 总线执行数据传输。
传输和接收 CAN 报文
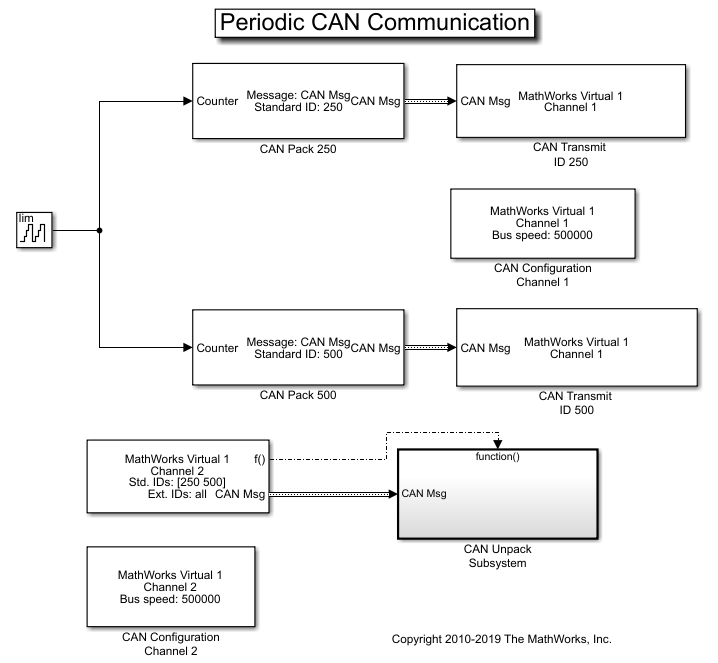
创建一个模型,以不同周期传输两条报文,并仅接收指定的报文和解包具有指定 ID 的报文。
使用一个 CAN Transmit 模块传输 ID 为 250 的 CAN 报文,每 1 秒传输一次报文。
使用另一个 CAN Transmit 模块传输 ID 为 500 的 CAN 报文,每 0.5 秒传输一次报文。
向两个 CAN Pack 模块各输入一个信号以使计数器自动递增,计数上限为 50。
两个 CAN Transmit 模块都连接到 MathWorks 虚拟通道 1。
使用一个 CAN Receive 模块从 MathWorks 虚拟通道 2 接收 CAN 报文。将该模块设置为:
仅接收 ID 为 250 和 500 的报文。
如果 Receive 模块在任何特定时间步接收到新报文,该模块会生成一个函数调用触发器。
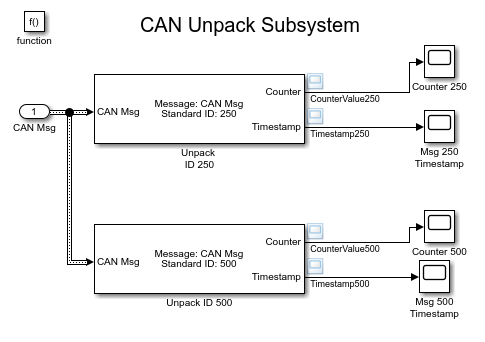
CAN Unpack 模块位于 Function-Call Subsystem (Simulink) 中。子系统仅当 CAN Receive 模块在特定时间步接收到新报文时才执行。
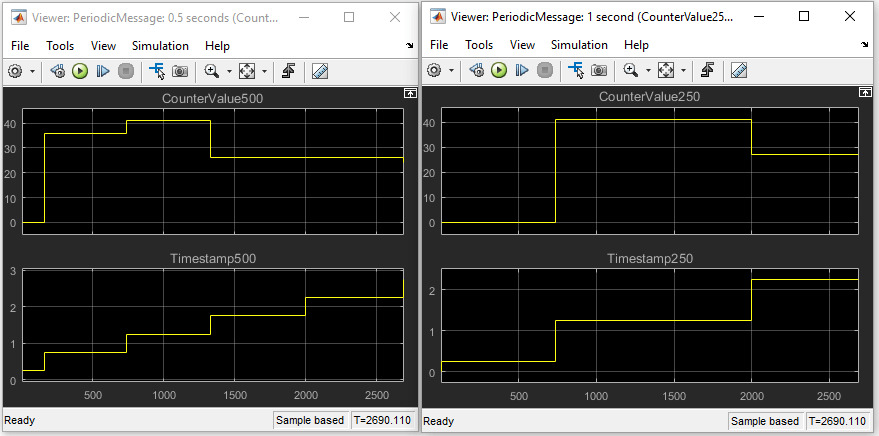
可视化不同时间戳的报文
绘制结果以查看每个解包报文的计数器值和时间戳。图上的 X 轴对应于仿真时间步。时间戳图显示报文是在指定时间发送的。还可以看出,由于指定了不同周期性速率,传输的 ID 为 250 的报文数量是 ID 为 500 的报文数量的一半。
扩展示例
此示例使用了 MathWorks 虚拟 CAN 通道。但是,您可以将模型连接到其他支持的硬件。您还可以修改模型以便以不同速率进行传输,或者传输周期性和非周期性报文的组合。
此示例使用 CAN 模块,但所演示的概念也适用于 Simulink 中的 CAN FD 模块。