Convolutional Encoder
Encode data bits using convolution coding — optimized for HDL code generation
Libraries:
Wireless HDL Toolbox /
Error Detection and Correction
Description
The Convolutional Encoder block encodes data bits using convolution coding. The block supports code rates from 1/2 to 1/7 and constraint lengths from 3 to 9 including both recursive and nonrecursive polynomials. The block provides an architecture suitable for HDL code generation and hardware deployment.
The block operates in three modes: continuous with an optional reset port, terminated, and
truncated with optional initial state and final state ports. In
Continuous mode, the block accepts data bits, along with a valid
signal, and outputs encoded bits with a valid signal. In Terminated
and Truncated modes, the block accepts data bits, along with a
samplecontrol bus and outputs encoded bits with a
samplecontrol bus.
The block supports communication standards such as Wi-Fi (802.11a/b/g/n/ac), digital satellite communications, digital video broadcast (DVB), 3GPP2, IEEE 802.16, HIPERLAN, and other technologies. You can use this block to implement other channel codes such as turbo codes, which are used in LTE standards.
This waveform shows the encoded output of the block in
Terminated mode, when block parameter Constraint
length is set to 7, Code generator to
[133 171], and Feedback connection to
0. The input and output ctrl buses are expanded to
show their control signals.

The latency of the block is three clock cycles, so the block returns the first encoded
output data after three clock cycles. In the Terminated mode, after
the end of the frame, the block resets the encoded states to all zeros state by appending
(Constraint length – 1) bits. So, the waveform shows the frame gap of
six (Constraint length – 1) clock cycles between the end of the frame
(ctrlIn.endIn) and the start of the next frame
ctrlln.startIn.
Examples
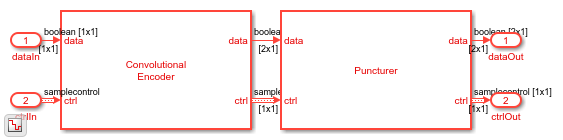
Convolutional Encode and Puncture Streaming Samples
Use Convolutional Encoder and Puncturer blocks to encode samples at WLAN code rates.
Ports
Input
Output
Parameters
Algorithms
A polynomial description of a Convolutional Encoder block describes the connections among shift registers and modulo 2 adders. This figure shows two sample encoding operations, one without feedback that has one input, two outputs, and two shift registers and the other with feedback that has one input, two outputs, and two shift registers.

b(n) represents input data bit stream and b(n-1) and
b(n-2) represent the 2-bit shift register of the encoder.
Out1(n) and Out2(n) represent the 2-bit output. From
this figure, you can calculate the block mask parameters based on the Convolutional codes
concepts. For more information about Convolution codes concepts, refer to Convolutional Codes. So, based on
the connections provided in the figure, the Constraint length is
3, Code generator value is [5
7]. The Feedback connection value is
0 for the encoder without feedback connection and
6 for the encoder with feedback connection.
References
[1] Lin, Shu, and Daniel J. Costello. Error Control Coding By Shu Lin, Daniel J. Costello, Second Edition. Upper Saddle River, NJ: Prentice Hall, 2004.
Extended Capabilities
Version History
Introduced in R2019b