GMSK Demodulator
Libraries:
Wireless HDL Toolbox /
Modulation
Description
The GMSK Demodulator block demodulates Gaussian minimum shift keying (GMSK) modulated symbols to a set of log-likelihood ratio (LLR) values or data bits. The block accepts complex data symbols and outputs demodulated LLR values or data bits. The block accepts scalar and vector inputs and returns a scalar output. The block interface and architecture are suitable for HDL code generation and hardware deployment.
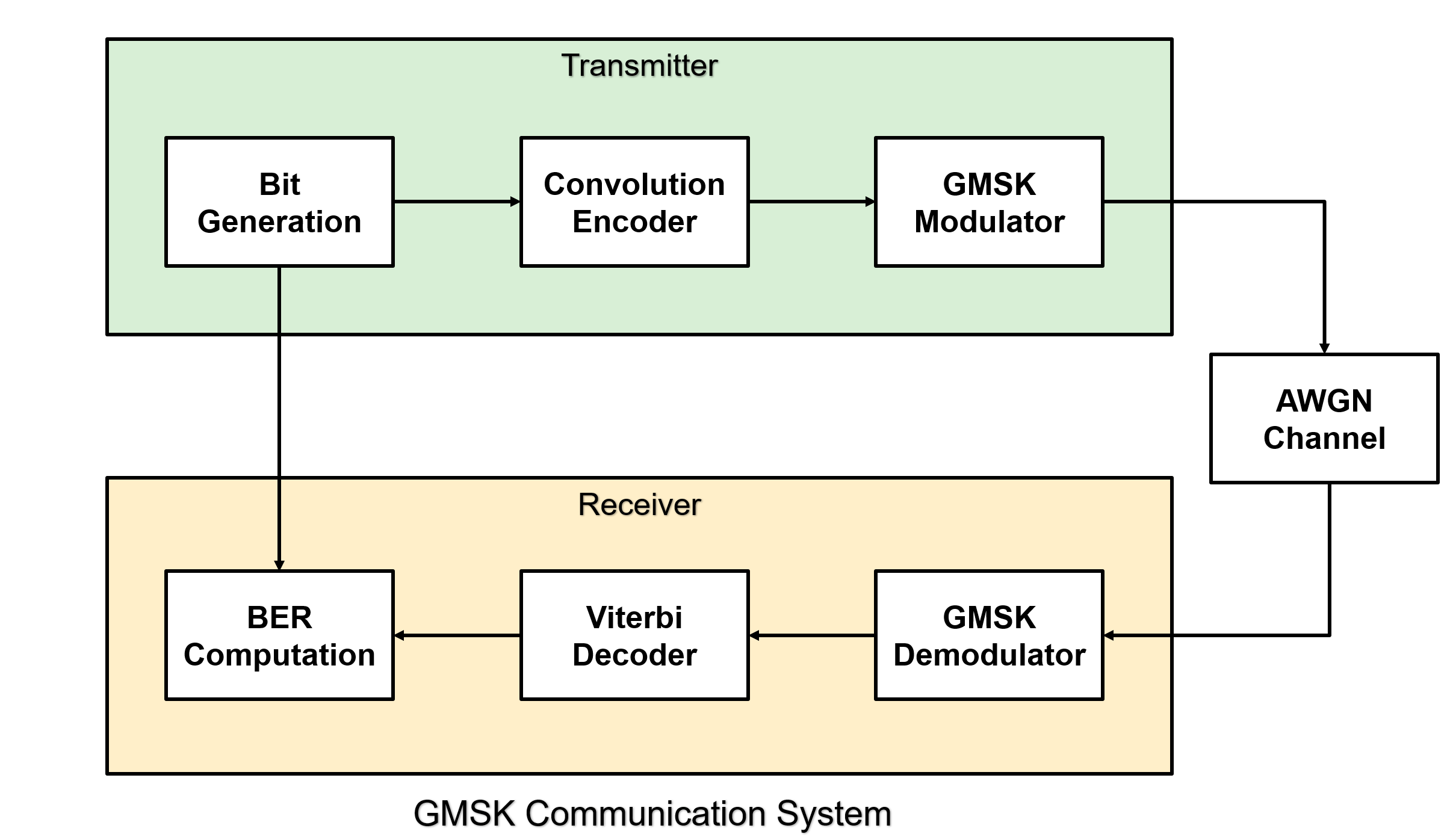
You can implement GMSK demodulation in systems where efficient bandwidth and power usage are essential, as GMSK modulation is specifically designed to address these requirements. By integrating a GMSK demodulator into such a system, you enable the receiver to take advantage of the modulation’s spectral and power efficiency, ensuring accurate recovery of transmitted data. You can use this block in applications such as global system for mobile communications (GSM), Bluetooth, and satellite communications, where optimizing resources is critical.
Examples
Recover Data Bits with GMSK Modulation and Demodulation
Convert data bits into modulated symbols and then recover the original bits through demodulation.
Accelerate BER Simulations of GMSK System Using FPGA-in-the-Loop Workflow
Accelerate BER simulations of GMSK system using FPGA-in-loop workflow.
Ports
Input
Output
Parameters
Algorithms
The GMSK Demodulator block uses either hard or soft-decision techniques. Hard demodulation makes a firm choice for each received symbol, while soft demodulation provides likelihood information that enhances error correction, especially in noisy environments. For narrowband, low-throughput systems where GMSK is commonly used, soft demodulation offers significant performance advantages. It typically relies on sequence estimation algorithms such as the soft Viterbi or maximum-a-posteriori (MAP) decoding. Among these, MAP decoding is preferred over the soft output Viterbi algorithm (SOVA) due to its superior error-correcting capability. This block implements the max-log-MAP variant, which achieves an effective balance between computational complexity and decoding accuracy, making it well-suited for hardware-based systems.
To compute soft log-likelihood ratios (LLRs) using the Max-Log-MAP algorithm, calculate and store branch metrics (γ), forward metrics (α), and reverse metrics (β).
Branch Metric Calculation: You compute the branch metrics γ according to the following equation:
Forward Metric Calculation: Next, you use the γ values to compute the forward metrics α as follows:
You initialize α with:
Reverse Metric Calculation: To calculate the reverse metrics β, you store the γ values and access them as needed:
Log-Likelihood Ratio Calculation: You then calculate the LLR from the stored α and γ values, along with the computed β values:
You can further simplify this calculation as:
Here, S0 and S1 represent the sets of state transitions corresponding to bit 0 and bit 1, respectively.
To ensure that these computations work efficiently, you must store both γ and α values according to the specified traceback depth. To optimize hardware efficiency, you implement the K-pointer algorithm, where K is the number of read pointers required in the algorithm. You allocate three memory blocks, each sized according to the traceback depth, to store the input data. You perform the traceback operation to compute the β values required for LLR computation. This approach allows you to read and write in reverse order based on the pointer and the demodulator state, which conserves memory resources.
The following figure illustrates the process of writing, reading, and performing traceback across different input windows during data decoding. While you encounter an initial latency of 4TB cycles, the output data stream is continuous thereafter, ensuring that throughput remains unaffected.
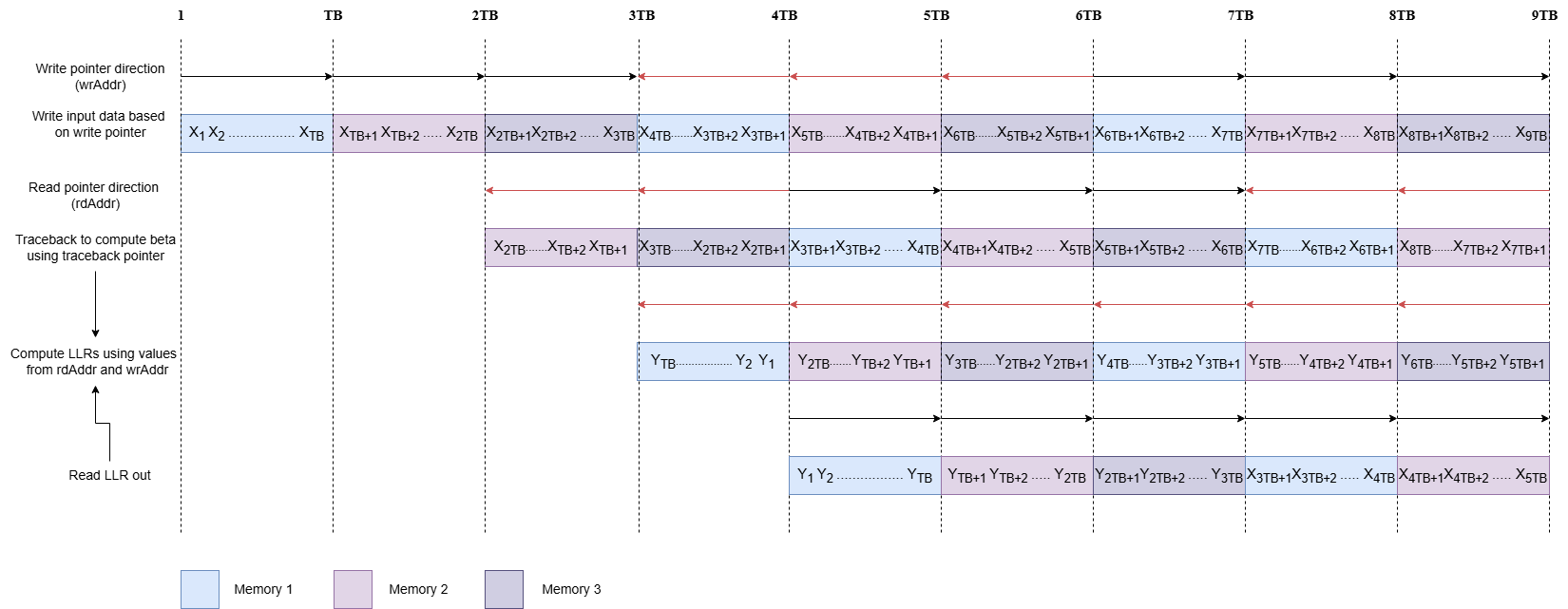
For more information about K-pointer algorithm, see Algorithms.
This approach enables efficient and reliable soft LLR computation in hardware implementations of the Max-Log-MAP algorithm. Hard-decision bit values are defined by rounding the LLR outputs resulting from soft-decision decoding.
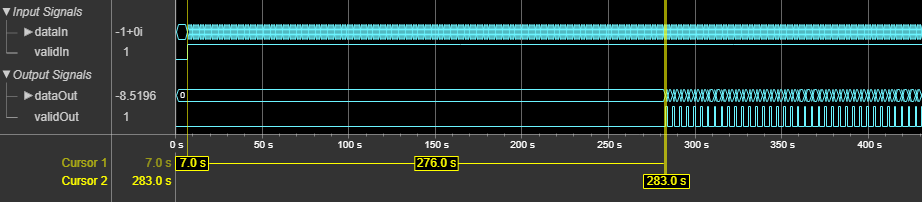
The latency of the block varies with the pulse length, traceback depth, and the input size.
This figure shows a sample output and latency of the GMSK Demodulator block for a scalar input with default configuration. The latency of the block is 276 clock cycles.
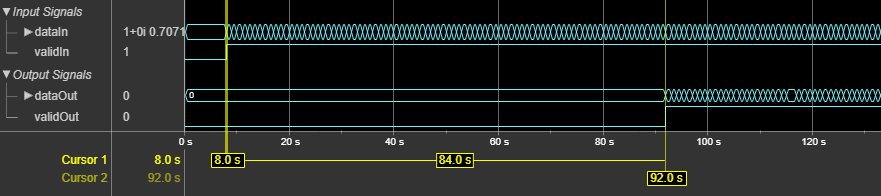
This figure shows a sample output and latency of the GMSK Demodulator block for a vector input with default configuration. The latency of the block is 84 clock cycles.
References
[1] Anderson, John B., Tor Aulin, and Carl-Erik Sundberg. Digital Phase Modulation. New York: Plenum Press, 1986.
Extended Capabilities
Version History
Introduced in R2026a