RS Encoder
Encode message to RS codeword
Libraries:
Wireless HDL Toolbox /
Error Detection and Correction
Description
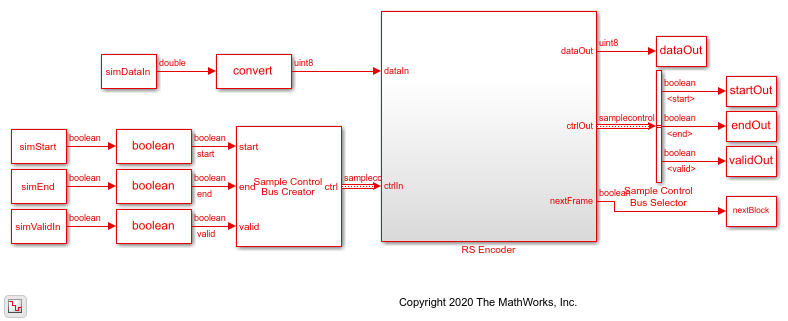
The RS Encoder block encodes message data to a Reed-Solomon (RS) codeword.
The block accepts message data and a samplecontrol bus and outputs codeword
data symbols and a samplecontrol bus.
Because the latency of the block varies, the block provides output port nextFrame that indicates when the block is ready to accept new input message data. The block provides an architecture suitable for HDL code generation and hardware deployment and supports shortened message lengths.
You can use this block to model many communication system forward error correcting (FEC) codes. The block supports digital subscriber line (DSL), WiMAX (802.16 m and e), digital video broadcast handheld (DVB-H) terminals, digital video broadcast satellite (DVB-S) services, and digital video broadcast satellite services to handheld (DVB-SH) devices below 3 MHz.
Examples
Encode Message to RS Codeword
Encode message to Reed-Solomon (RS) codeword.
Ports
Input
Output
Parameters
Algorithms
The RS Encoder block encodes a message data of length K into an RS codeword of length N. The block requires a minimum gap of N – K clock cycles to add N – K parity length to the message data of length K. During these N – K parity length clock cycles, the block does not accept new data. So, the minimum duration between messages must be N – K clock cycles.
Every
startsignal that is high indicates the start of a new message. When multiplestarthigh signals exist, the block accepts only the lateststartsignal.startandendhigh signals are valid only when thevalidsignal of the block is high.The block accepts
endsignals with the correspondingstartsignal. In case of multipleendhigh signals, the block accepts only the firstendhigh signal and ignores the remainingendhigh signals.
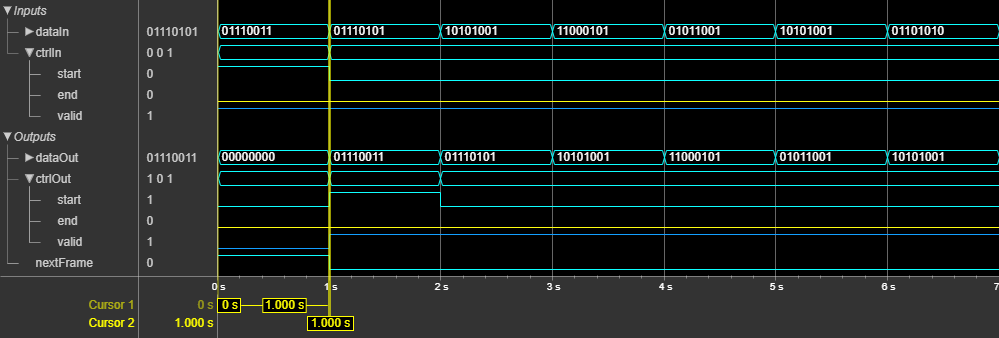
This figure shows a sample output of the RS Encoder block with latency
according to the DVB-S standard configuration, Codeword length (N) and
Message length (K) parameter values specified as
255 and 239, respectively, and with puncturing
disabled. In this case, the latency of the block is 1 clock cycle.
ck
References
[1] Wicker, Stephen B. Error Control Systems for Digital Communication and Storage. Englewood Cliffs, NJ: Prentice Hall, 1995.
[2] Clark, George C., and J. Bibb Cain. Error-Correction Coding for Digital Communications. Applications of Communications Theory. New York: Plenum Press, 1981.
Extended Capabilities
Version History
Introduced in R2020b