Decode and Recover Message from RS Codeword Using CCSDS Standard
This example shows how to use the CCSDS RS Decoder block to decode and recover a message from a Reed-Solomon (RS) codeword according to the Consultative Committee for Space Data Systems (CCSDS) standard. Generate and encode a set of random inputs and then provide them as input to the ccsdsRSDecode (Satellite Communications Toolbox) function and the CCSDS RS Decoder block by adding errors. Compare the output of the CCSDS RS Decoder block with the output of the ccsdsRSDecode function. The example model supports HDL code generation for the HDL CCSDS RS Decoder subsystem.
Set Up Input Data Parameters
Set up workspace variables for the model to use. You can modify these variable values according to your requirements. The block supports a fixed codeword length of 255.
k = 239; % Message length 223 or 239 s = k; % Shortened message length ranges from 1 to k i = 4; % Interleaving depth 1, 2, 3, 4, 5, or 8 numFrames = 3; % Number of input frames numErrors = 16; % Maximum number of correctable errors allowed in the input frame is (255-k)*i/2
Generate Random Input Samples
Generate random samples using the specified message length, shortened message length, and interleaving depth. Encode the random samples using the ccsdsRSEncode function, and then insert numErrors number of errors at random locations in the encoded samples.
% Generate random message samples msg = randi([0 255],s*i,1); % Encode message samples encoderOut = ccsdsRSEncode(msg,k,i,s); % Insert errors in encoded output errorLoc = randi([1 (255-k+s)*i],numErrors,1); errorVal = randi([1 255],numErrors,1); chOut = encoderOut; chOut(errorLoc) = errorVal;
Decode Encoded Data Using MATLAB® Function
Decode the encoded data containing errors using the ccsdsRSDecode function.
[refOutput,refNErr] = ccsdsRSDecode(chOut,k,i,s); refOutput = repmat(refOutput,numFrames,1); refNErr = repmat(refNErr,numFrames,1);
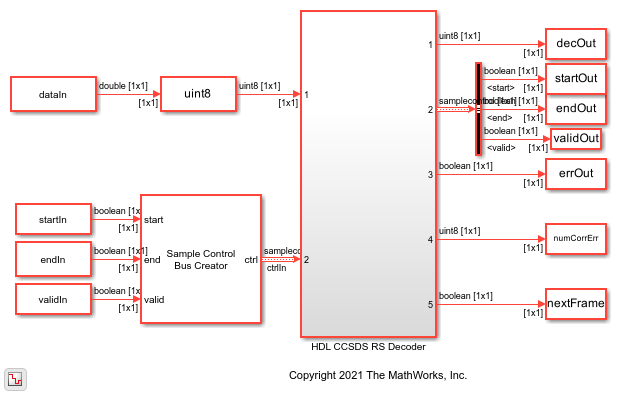
Decode Encoded Data Using Simulink® Block
Decode the encoded data containing errors using the CCSDS RS Decoder block. Running the model imports the input signal variables from the MATLAB workspace to the CCSDS RS Decoder block in the model.
% Set frame gap between input frames if(k == 223 && (i == 1 || i == 2)) frameGap = 602-(255*i); else frameGap = 0; end % Assign inputs to model dataIn = repmat([chOut; zeros((k-s)*i,1); zeros(frameGap,1)],numFrames,1); startIn = repmat([true; false(255*i -1,1); false(frameGap,1)],numFrames,1); endIn = repmat([false((255-k+s)*i -1,1); true; false((k-s)*i,1); ... false(frameGap,1)],numFrames,1); validIn = repmat([true((255-k+s)*i,1); false((k-s)*i,1); ... false(frameGap,1)],numFrames,1); numOutputSamples = k*i; stopTime = (3065 + numOutputSamples)*numFrames; % Maximum latency of the % block is 3065 clock cycles % Run the Simulink model model_name = 'HDLCCSDSRSDecoder'; open_system(model_name); set_param([model_name '/HDL CCSDS RS Decoder/CCSDS RS Decoder'], ... 'MessageLength',num2str(k),'InterleavingDepth',num2str(i)); sim(model_name);
Compare Simulink Block Output with MATLAB Function Output
Compare the CCSDS RS Decoder block output with the ccsdsRSDecode function output.
dataOut = squeeze(decOut); validOut = squeeze(validOut); endOut = squeeze(endOut); numCorrErrOut = squeeze(numCorrErr); simOutput = dataOut(validOut); fprintf('\nHDL CCSDS RS Decoder\n'); difference = double(simOutput) - double(refOutput); fprintf(['\nTotal number of samples that differ between Simulink block output ' ... 'and MATLAB function output is: %d \n'],sum(difference));
HDL CCSDS RS Decoder Total number of samples that differ between Simulink block output and MATLAB function output is: 0
See Also
Blocks
Functions
ccsdsRSDecode(Satellite Communications Toolbox)