搜索
- I open the MQTT Configure block.
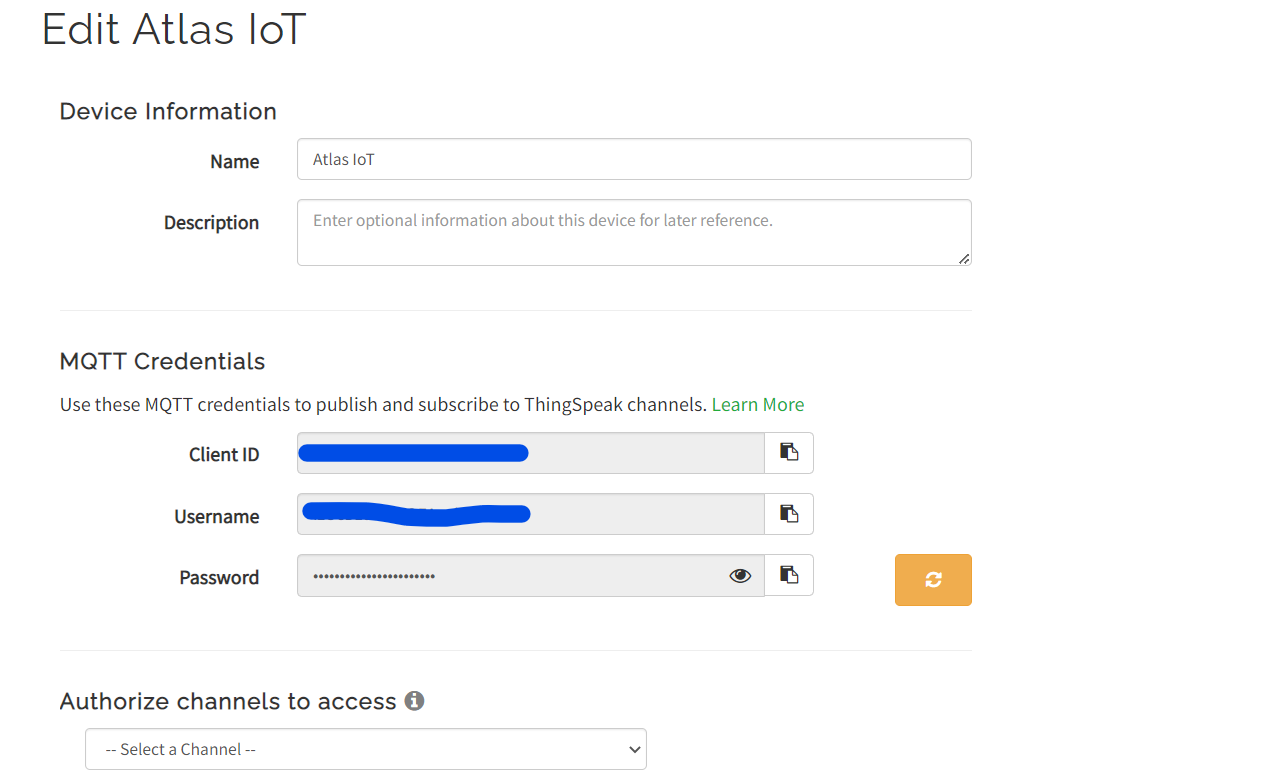
- I fill out all the required fields — Broker address, Port, Client ID, Username, and Password.
- When I click Test Connection, it says “Connection established successfully.” So far so good.
- Then I click Apply, close the dialog, set the topic name, and try to run the simulation.
- At this point, I get the following error:Caused by: Invalid value for 'ClientID', 'Username' or 'Password'.
- When I reopen the MQTT config block, I notice that the Password field is empty again — even though I definitely entered it before and the connection test worked earlier.

Hi, this is my first question here... hope not to bother you all. Is it possible to stop a sensor from collecting data by using ThingSpeak/MQTT broker/MQTT protocol? How? I'm working with a MAX30102 for oxigen and bpm detection and I need to stop the sensor from ThingSpeak or at least this is what I was asked to do. At the moment I can't figure out how to do this except by using the APIkey and the HTTP protocol but my task was to only use MQTT protocol. Hope someone can help me finding a new point of view about this topic/problem.
EDIT: I solved the problem. I used another client, MQTTx to be precise, in order to send messages in a field of control. So, at the beginning I had just two fields (BPM and SpO2), then I added a third field of control. The board WeMos, connected to the sensor MH-ET LIVE MAX30102 was used to process the sensor's data and send them to Thingspeak every 15 seconds wherease the client desktop MQTTx was also connected to ThingSpeak's broker and enbled for both publish and subscribe and I used it to send messages of ON and OFF, literally, as payload for the control field. This messages were passed to the callBack function and the payload was checked in order to change the state of my code, nested in a switch system. Thamk's for the help to you all :) If you're interested to the code and the settings just let me know.
Hi there,
I have tried to get the data on thingspeak via integrating it on the things Network. but the GPS data I am receiving on the thingspeak is delayed by 2 mins.
is there any way I can code to send JSON file straight on thingspeak from the sensor or the gateway?
Following is the ardiuno sketch
#include <lmic.h> #include <hal/hal.h> #include <SPI.h> #include <SoftwareSerial.h> #include <TinyGPS.h> TinyGPS gps; SoftwareSerial ss(3, 4); // Arduino RX, TX to conenct to GPS module.
static void smartdelay(unsigned long ms);
unsigned int count = 1; //For times count
String datastring1=""; String datastring2=""; String datastring3=""; uint8_t datasend[20]; //Used to store GPS data for uploading
char gps_lon[20]={"\0"}; //Storage GPS info
char gps_lat[20]={"\0"}; //Storage latitude
char gps_alt[20]={"\0"}; //Storage altitude
float flat, flon,falt;
static uint8_t mydata[] = "Hello, world!"; //For test using.
/* LoRaWAN NwkSKey, network session key
This is the default Semtech key, which is used by the prototype TTN
network initially.
ttn*/
static const PROGMEM u1_t NWKSKEY[16] = { 0xE4, 0x2A, 0x93, 0x96, 0xF7, 0xC9, 0x65, 0x9E, 0xF8, 0x90, 0xC6, 0xA0, 0x1A, 0x88, 0xF7, 0x47 };
/* LoRaWAN AppSKey, application session key
This is the default Semtech key, which is used by the prototype TTN
network initially.
ttn*/
static const u1_t PROGMEM APPSKEY[16] = { 0x75, 0x43, 0x26, 0xA1, 0x82, 0x79, 0x7F, 0xCF, 0x3C, 0x1D, 0xBF, 0xF9, 0xBF, 0xCB, 0xC6, 0xD9 };
/* LoRaWAN end-device address (DevAddr) See http://thethingsnetwork.org/wiki/AddressSpace ttn*/ static const u4_t DEVADDR = 0x260111D1;
/* These callbacks are only used in over-the-air activation, so they are
left empty here (we cannot leave them out completely unless
DISABLE_JOIN is set in config.h, otherwise the linker will complain).*/
void os_getArtEui (u1_t* buf) { }
void os_getDevEui (u1_t* buf) { }
void os_getDevKey (u1_t* buf) { }
static osjob_t initjob,sendjob,blinkjob;
/* Schedule TX every this many seconds (might become longer due to duty cycle limitations).*/ const unsigned TX_INTERVAL = 20;
// Pin mapping
const lmic_pinmap lmic_pins = {
.nss = 10,
.rxtx = LMIC_UNUSED_PIN,
.rst = 9,
.dio = {2, 6, 7},
};
void do_send(osjob_t* j){
// Check if there is not a current TX/RX job running
if (LMIC.opmode & OP_TXRXPEND) {
Serial.println("OP_TXRXPEND, not sending");
} else {
GPSRead();
GPSWrite();
// Prepare upstream data transmission at the next possible time.
LMIC_setTxData2(1,datasend,sizeof(datasend)-1,0);
//LMIC_setTxData2(1, mydata, sizeof(mydata)-1, 0);
Serial.println("Packet queued");
Serial.print("LMIC.freq:");
Serial.println(LMIC.freq);
Serial.println("");
Serial.println("");
Serial.println("Receive data:"); }
// Next TX is scheduled after TX_COMPLETE event.
}void onEvent (ev_t ev) {
Serial.print(os_getTime());
Serial.print(": ");
Serial.println(ev);
switch(ev) {
case EV_SCAN_TIMEOUT:
Serial.println("EV_SCAN_TIMEOUT");
break;
case EV_BEACON_FOUND:
Serial.println("EV_BEACON_FOUND");
break;
case EV_BEACON_MISSED:
Serial.println("EV_BEACON_MISSED");
break;
case EV_BEACON_TRACKED:
Serial.println("EV_BEACON_TRACKED");
break;
case EV_JOINING:
Serial.println("EV_JOINING");
break;
case EV_JOINED:
Serial.println("EV_JOINED");
break;
case EV_RFU1:
Serial.println("EV_RFU1");
break;
case EV_JOIN_FAILED:
Serial.println("EV_JOIN_FAILED");
break;
case EV_REJOIN_FAILED:
Serial.println("EV_REJOIN_FAILED");
break;
case EV_TXCOMPLETE:
Serial.println("EV_TXCOMPLETE (includes waiting for RX windows)");
if(LMIC.dataLen) {
// data received in rx slot after tx
Serial.print("Data Received: ");
Serial.write(LMIC.frame+LMIC.dataBeg, LMIC.dataLen);
Serial.println();
}
// Schedule next transmission
os_setTimedCallback(&sendjob, os_getTime()+sec2osticks(TX_INTERVAL), do_send);
break;
case EV_LOST_TSYNC:
Serial.println("EV_LOST_TSYNC");
break;
case EV_RESET:
Serial.println("EV_RESET");
break;
case EV_RXCOMPLETE:
// data received in ping slot
Serial.println("EV_RXCOMPLETE");
break;
case EV_LINK_DEAD:
Serial.println("EV_LINK_DEAD");
break;
case EV_LINK_ALIVE:
Serial.println("EV_LINK_ALIVE");
break;
default:
Serial.println("Unknown event");
break;
}
}
void setup() {
// initialize digital pin as an output.
Serial.begin(9600);
ss.begin(9600);
while(!Serial);
Serial.println("LoRa GPS Example---- ");
Serial.println("Connect to TTN");
#ifdef VCC_ENABLE
// For Pinoccio Scout boards
pinMode(VCC_ENABLE, OUTPUT);
digitalWrite(VCC_ENABLE, HIGH);
delay(1000);
#endif // LMIC init
os_init();
// Reset the MAC state. Session and pending data transfers will be discarded.
LMIC_reset();
/*LMIC_setClockError(MAX_CLOCK_ERROR * 1/100);
Set static session parameters. Instead of dynamically establishing a session
by joining the network, precomputed session parameters are be provided.*/
#ifdef PROGMEM
/* On AVR, these values are stored in flash and only copied to RAM
once. Copy them to a temporary buffer here, LMIC_setSession will
copy them into a buffer of its own again.*/
uint8_t appskey[sizeof(APPSKEY)];
uint8_t nwkskey[sizeof(NWKSKEY)];
memcpy_P(appskey, APPSKEY, sizeof(APPSKEY));
memcpy_P(nwkskey, NWKSKEY, sizeof(NWKSKEY));
LMIC_setSession (0x1, DEVADDR, nwkskey, appskey);
#else
// If not running an AVR with PROGMEM, just use the arrays directly
LMIC_setSession (0x1, DEVADDR, NWKSKEY, APPSKEY);
#endif // Disable link check validation
LMIC_setLinkCheckMode(0); // TTN uses SF9 for its RX2 window.
LMIC.dn2Dr = DR_SF9; // Set data rate and transmit power (note: txpow seems to be ignored by the library)
LMIC_setDrTxpow(DR_SF7,14); // Start job
do_send(&sendjob);
}void GPSRead()
{
unsigned long age;
gps.f_get_position(&flat, &flon, &age);
falt=gps.f_altitude(); //get altitude
flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flat, 6;
flon == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flon, 6;//save six decimal places
falt == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : falt, 2;//save two decimal places
}
void GPSWrite()
{
/*Convert GPS data to format*/
datastring1 +=dtostrf(flat, 0, 4, gps_lat);
datastring2 +=dtostrf(flon, 0, 4, gps_lon);
//datastring3 +=dtostrf(falt, 0, 2, gps_alt);
if(flon!=1000.000000)
{
strcat(gps_lon,",");
strcat(gps_lon,gps_lat);
//strcat(gps_lon,",");
//strcat(gps_lon,gps_alt);
int i = 0;
for(i = 0; i < 2; i++)
{
//datasend.toFloat();
atof(gps_lon);
//Serial.println((char*)datasend);
Serial.println("Testing converted data:");
Serial.println(gps_lon);
// atof(gps_alt);
// Serial.print(gps_alt);
} strcpy(datasend,gps_lon); //the format of datasend is longtitude,latitude,altitude
Serial.print("########### ");
Serial.print("NO.");
Serial.print(count);
Serial.println(" ###########");
Serial.println("The longtitude and latitude are:");
Serial.print("[");
Serial.print((char*)datasend);
Serial.print("]");
Serial.print("");
/*
for(int k = 0; k < 20;k++)
{
Serial.print("[");
Serial.print(datasend[k], HEX);
Serial.print("]");
}
Serial.println("");
Serial.println("");*/
count++;
} int32_t lng = flat * 10000;
int32_t lat = flon * 10000; datasend[0] = lat;
datasend[1] = lat >> 8;
datasend[2] = lat >> 16; datasend[3] = lng;
datasend[4] = lng >> 8;
datasend[5] = lng >> 16;
smartdelay(1000);
}static void smartdelay(unsigned long ms)
{
unsigned long start = millis();
do
{
while (ss.available())
{
gps.encode(ss.read());
}
} while (millis() - start < ms);
}
void loop() {
os_runloop_once();
}
Hello,
I am sending mqtt values from esp8266 devices to different channels - e.g. https://thingspeak.com/channels/1182897
The values are sent correctly and also show up on the channel's page correctly and quickly in time.
But mqtt receivers are getting the data with a varying long delay. Often the delay is 1h, so I first thought, this could be a time zone problem. But that's not the case.
I tried two different mqtt clients: Both get the values at the same (late time): E.g. when I now get a value from channels/1182897/subscribe/fields/field3 and look into the history of values (using "Data Import/Export") then this value can be found 20 minutes up to 1 hour ago. This can also be confirmed when looking into the device's logs.
What could I do to be up-to-date with my values? Thank you very much. Dirk
I'd appreciate comment on whether I understand the limitations with MQTT and low power. Using deep sleep the ESP12 consumes microamps and my sensor is insignificant. The big drain on the battery is WiFi. Sending an MQTT message is taking around 10ms which seems at first sight promising. Unfortunately it looks to me like deep sleep ends the connection, and reconnection takes 4 or more seconds. I'd thought that deep sleep, static IP, and MQTT were the way to get very low power consumption but it looks to me like they don't solve the problem.
Hi, i wonder if any one experiencing the same, but in my thing sepak profiel i can only see : 1- User API Key 2- Alert API Key
but no MQTT API key? not sure why Thank you
Hello, since today 14:00 CEST (UTC+2) (= 12:00 UTC = 4 hours ago) none of my thinkspeak clients running on Arduinos using PubSubClient are able to connect to mqtt.thingspeak.com. Until then, they have been running happily for months.
I tried to send some data manually but didn't succeed:
mosquitto_pub -d -h mqtt.thingspeak.com -u TESTTerrasseWemos -p 1883 -P xxxx -t "channels/cccc/publish/yyyy" -m "field1=10&field2=60" ; echo $? Client mosq-xxxxxxx sending CONNECT Error: Unknown error. 19
The exact errors differ from try to try. But I don't know if my call is definitely correct.
Any help or information what might have changed at mqtt.thingspeak.com?
Thank you very much.
Hello community, I am trying to subscribe using the MQTT protocol.
The problem occurs when I try to request the subscribe, I send the subscribe and my connection with the server is closed.