Adaptive Cruise Control with Sensor Fusion Using Model Predictive Control
Melda Ulusoy, MathWorks
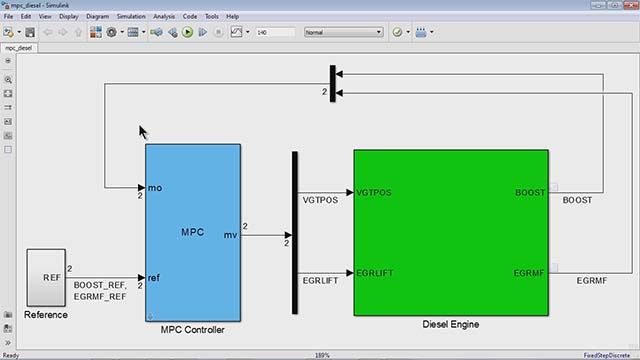
This video demonstrates an MPC application for ADAS and automated driving systems. You’ll learn how to simulate a control system that combines sensor fusion and adaptive cruise control (ACC). Using Simulink®, you can model ACC systems with vehicle dynamics and sensors, create driving scenarios, and test the control system in a closed-loop to evaluate controller performance.
You can use Automated Driving Toolbox™ and Model Predictive Control Toolbox™ to design and simulate MPC controllers for ADAS and automated driving systems. Automated Driving Toolbox supports multisensor fusion development and provides sensor models and scenario generation for simulating roads and surrounding cars. Using Embedded Coder®, you can automatically generate C code from your Simulink model and deploy it for software-in-the-loop (SIL) testing and hardware implementation.
Published: 30 Oct 2018

Featured Product