小迈步之人工智能(三):深入浅出强化学习 – 从零起步玩转倒立摆
概述
强化学习已成功训练计算机程序在游戏中击败全球最厉害的人类玩家,这究竟是如何实现的?有别于机器学习中的监督式学习和非监督学习,强化学习是指在没有数据和标签的情况下,通过让智能体与外部环境交互,不断试错后收敛到最佳策略。MATLAB和Simulink为您提供了强大的计算和建模仿真平台,您可以利用丰富的函数和模块,实现完整的强化学习工作流。
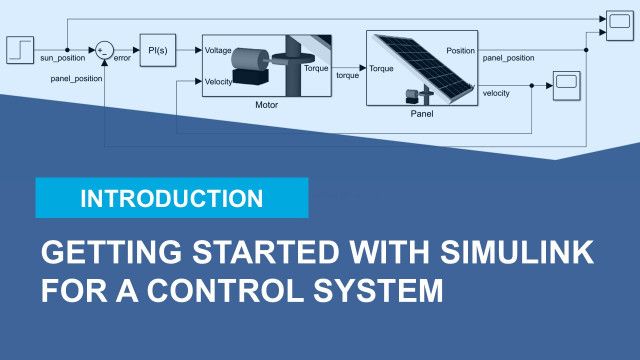
本次微直播中,您将了解怎样使用MATLAB和Simulink设计强化学习智能体以控制倒立摆保持平衡,包括如何创建倒立摆的仿真环境模型,定义智能体策略结构,使用内置的强化学习算法进行训练并验证策略,通过仿真动画可视化训练结果,以及自动代码生成辅助策略部署。
亮点
- 了解强化学习如何解决复杂控制和决策问题
- 使用MATLAB/Simulink创建倒立摆环境模型
- 创建基于深度神经网络的智能体策略 (DDPG)
- 训练智能体并验证策略
- 仿真并可视化训练结果
- 策略函数导出与自动代码生成
关于演示者
袁航,MathWorks中国应用工程师,专注于数据分析和人工智能应用,曾任职于林德液压(德国),从事计算编程、流体仿真和系统建模。硕士毕业于北京航空航天大学机械电子工程专业。
录制日期: 2020 年 4 月 23 日