巴拉特电子有限公司将 AI 应用于三维雷达的俯仰角估计
“AI 可以帮助我们完成更多任务。我们发现,如果无法获得更多数据,也可以借助 MATLAB 生成仿真数据。”
关键成果
- 传感器阵列分析器支持自定义传感器阵列设计和可视化,而无需花费额外的时间对复杂的仿真进行编码,即可生成数据集来训练 AI 模型
- MATLAB 中的曲线拟合工具简化了计算俯仰角估计值的过程,并提供了更准确的结果
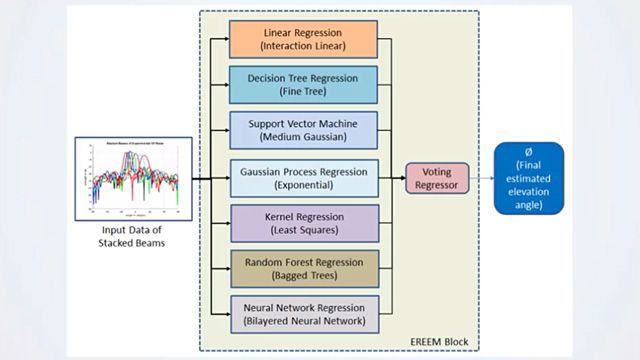
- 回归学习器使用多重回归方法评估数据,以找到最佳拟合来实现准确的预测
巴拉特电子有限公司是开发雷达系统(包括三维监视雷达)的领先厂商。对于这些雷达,一个关键参数是使用单径波束或多径波束来估计目标的俯仰角。这些波束可能受环境因素的干扰,包括多波束反射和热噪声等因素。以手动方式将所有这些因素考虑在内,可能是一个复杂而又耗时的过程。
该团队通过使用 Radar Toolbox 来可视化不同波束路径,从而简化了这一过程。传感器阵列分析器使该团队可以轻松地操作各种参数,如几何形状和柱锥度,而回归学习器让他们可以使用多重回归方法快速评估其数据集以找到最佳拟合。巴拉特电子有限公司的团队还使用 MATLAB® 生成仿真数据来填补空缺。
这些 AI 工具共同实现了更可靠、更准确的俯仰角预测,同时节省了该团队在执行复杂计算和收集现场记录数据方面所花的时间。