- 产生稳定的交流电功率输出。该输出需符合电网规范并符合 NERC 规范
- 在不同条件下最大化功率输出
- 在电网故障期间保持逆变器与电网之间的连接
- 在电网停电时提供反孤岛保护
Simulink® 和 Simscape Electrical™ 有助于加快并网逆变器数字控制器的设计过程。
控制器设计过程可分为三个主要阶段:使用电气系统仿真设计和优化控制,为被控对象和控制器生成代码,以及使用硬件在环 (HIL) 仿真测试控制硬件。

用于设计、仿真和测试并网逆变器控制器的工作流。
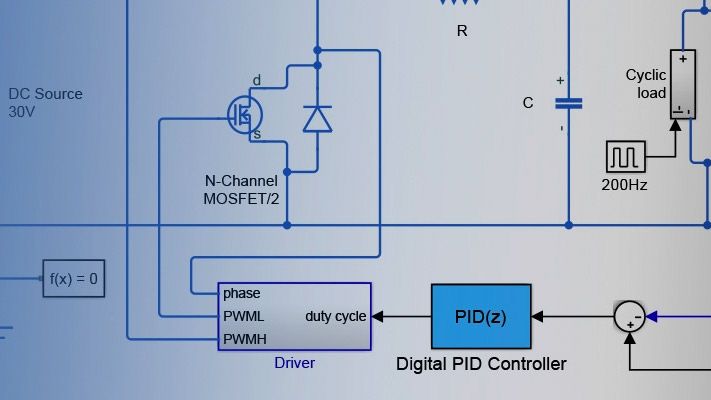
使用电气系统仿真设计和优化控制
并网逆变器的数字控制策略可以针对不同电网规范,例如 IEEE® 1547-2018,进行测试,以确保该算法完全符合电网规范。Simulink 和 Simscape Electrical 提供执行电力系统仿真和优化的功能。通过将逆变器模型连接到外部电源模型(例如光伏电厂)和电网模型,您可以对包括发电厂、逆变器和电网在内的整个电力系统进行建模和仿真。

来自 Simscape 记录的仿真结果
下图显示了逆变器和电网中的线电压和相电流。

为被控对象和控制器生成代码
在对控制器进行建模和仿真后,您可以使用 Embedded Coder® 为控制器生成无缺陷、已优化的 C 代码。Embedded Coder 的硬件支持包使您能够轻松地将代码部署到支持的微控制器上。您还可以使用 Simulink Coder™ 和 HDL Coder™ 为被控对象生成 C 和 HDL 代码。然后,可以将代码部署到 Speedgoat® 实时目标机上,该机器配有多核 CPU 和 FPGA 并运行 Simulink Real-Time™。
使用 HIL 仿真测试控制硬件
代码部署在微控制器和 Speedgoat 目标机上后,您就可以执行电力电子硬件在环 (HIL) 测试,并在正常条件和故障条件下彻底测试逆变器的数字控制了。
HIL 仿真使您能够用实时系统替代生产硬件。这将降低测试成本,并有助于避免使用高压生产电气系统带来的潜在损坏和危险。HIL 测试可以轻松、快速、安全地自动测试并网逆变器的数字控制,尤其是在故障条件下。
示例和操作方法
视频:
客户案例:
示例:
软件参考
另请参阅: 仿真软件, 建模和仿真, PID 调节, 使用 MATLAB 和 Simulink 进行嵌入式代码生成, Simulink Real-Time 中针对实时仿真和测试的 Speedgoat 硬件支持, 下垂控制, 构网逆变器