Simscape Battery
设计和仿真电池与储能系统
硬件在环 (HIL) 测试是一种实时仿真,让您无需使用系统硬件即可开始测试嵌入式代码。如果正在开发的代码未按照规范运行,您可以通过此项测试来发现可能损坏硬件的异常和故障情况。电力电子控制系统是电力运输和可再生能源系统不可或缺的组成部分。通过测试原型来验证这些控制系统的嵌入式代码具有挑战性,因为存在硬件损坏的风险,而这会导致您无法在整个瞬态条件范围内试验系统。
硬件在环 (HIL) 仿真性能取决于您要建模的电力系统动态的复杂性以及要使用的实时计算机硬件。例如,您可以选择如何为电机驱动逆变器的电力电子开关行为建模。您可以使用平均值逆变器模型对整个开关周期的电压求平均值,因为该模型可以快速计算并提供所需的动态特性。要想了解电力电子组件注入的谐波的影响,您需要考虑它们的开关行为,并承受对硬件在环计算机的处理器造成的负担。
为了确保仿真开关行为时的实时行为,您运行仿真采样的频率需要比实际系统的预期开关速度快 100 倍。例如,在以 10 KHz 开关频率运行的电机控制应用中,需要以 1 MHz 的频率运行硬件在环仿真,才能捕获开关设备所导致的非线性问题。要以 1 MHz 或更高的频率运行仿真,您需要实时系统具有较低 I/O 延迟和可以达到运行频率的处理器。
对电力电子系统执行硬件在环测试时,并没有绝对的指导说明 CPU 或 FPGA 是否更适合于仿真具有开关动态特性的系统。在做决定时,您需要考虑模型的复杂性、电力电子系统的数学细节、负载和电源的建模细节,以及测试系统 I/O 的通道数量和种类。如果您的硬件在环系统可以将桌面仿真模型划分到多个内核和不同种类的处理器上,您可能会发现同时使用 CPU 和 FPGA 很有好处。
使用 MATLAB 和 Simulink 进行硬件在环仿真
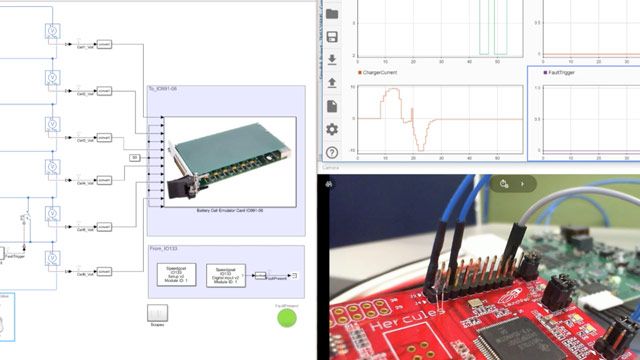
电力电子系统的硬件在环测试从控制系统仿真开始,该仿真会对有源和无源电路组件、负载和电源的电气行为建模。使用 Simulink® 和 Simscape Electrical™,您可以构建您的系统模型并进行仿真。使用 Simulink Coder™ 从电气模型生成 C 代码,通过 HDL Coder™ 生成 HDL 代码。您可将此代码部署到用于测试控制代码的实时计算机,从而在一系列正常和故障工作条件下验证此代码。使用 Simulink Real-Time™,您可将代码部署到 Speedgoat 实时目标机器上。此外,Speedgoat 支持电力硬件在环测试,让您可以测试电池管理系统 (BMS)、纯电动动力总成系统和可再生能源系统。进一步了解如何使用 Speedgoat 进行电网侧变换器 HIL 测试。