Student Competition: Physical Modeling Training, Part 9: Building Mechanical Assemblies, Section 2
From the series: Student Competition: Physical Modeling Training
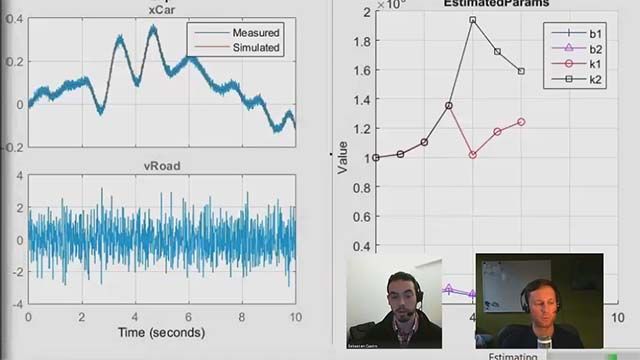
We continue to build on the example from Student Competition - Physical Modeling Training, Part 8: Building Mechanical Assemblies, Section 1 to show how to sense and log simulation results, add internal mechanics to joints, set initial conditions for mechanical configurations, actuate joints, and apply external force on parts.
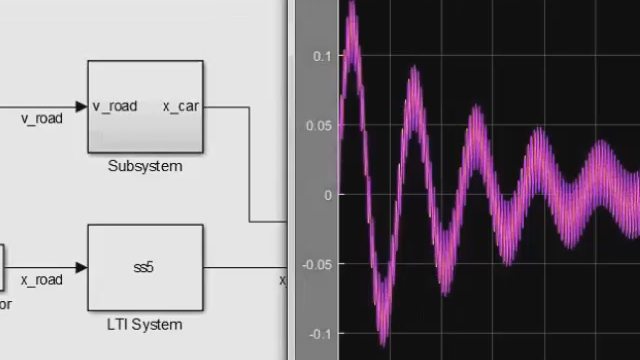
In Section 1 you saw that the motion was not fully constrained. Now, you’ll add a shock absorber component, define internal mechanics and initial conditions for the assembly, and implement and subject the suspension system to an external force test.
In summary, you’ll see how to specify degrees of freedom for mechanical assemblies, sense and log simulation results, add real world mechanics into the simulation such as stiffness and damping, set initial conditions for mechanical configurations, actuate joints based on motion profiles and forces, and exert force on specific frames independent of joints.
Additional Resources:
- Internal Mechanics, Actuation, and Sensing
- Setting Up Solvers for Physical Models
- Importing Data to Root-Level Input Ports
- Load Signal Data for Simulation
- Simscape Mechanical System with Translational Hard Stop
- Simulink Friction Model with Hard Stops
- SimMechanics Contacts Forces Library
- SimMechanics Features
- SimMechanics Documentation
- SimMechanics Built-in Demos
Published: 2 Mar 2016