多体动态特性
多体动态特性研究由通过关节连接的刚体和/或柔性体组成的机械系统的动态行为。这些实体在施加的力、扭矩和约束的作用下发生平移和旋转运动。通过使用 Simscape™ Multibody™,可对复杂系统(例如机器人、车辆、建筑设备或飞机起落架)执行多体动态特性仿真。您可以指定力、扭矩和运动输入来驱动模型,并对模型的动态响应进行仿真。
要指定一对实体之间的自由度,请使用 Joints 库和 Constraints 库中的模块。例如,您可以使用 Prismatic Joint 模块和 Revolute Joint 模块来对滑块曲柄机构的直线运动和旋转运动进行建模。您可以使用 Point on Curve Constraint 模块来对过山车车厢与轨道之间的约束进行建模。
要对作用于实体上的力和扭矩进行建模,请使用 Forces and Torques 库中的模块。例如,您可以使用 Magic Formula Tire Force and Torque 模块来对轮胎与地面之间的轮胎力和扭矩进行建模。在对接触问题(例如机器人抓取)进行建模时,可以使用 Spatial Contact Force 模块来对一对实体之间的力进行建模。
要测量实体之间的相对运动,您可以使用 Transform Sensor 模块。要测量力和扭矩,您可以使用 Constraints、Joints 以及 Forces and Torques 库中的模块。实体上关节处的负载可以通过关节模块进行测量,约束模块可以感测维持一对实体之间的约束的力和扭矩。在分析机械系统的多体动态特性时,这些量中的每一个都有助于您回答重要问题。
类
Simscape 模块
主题
感测力、扭矩和运动输出
- Analyze Motion at Various Parameter Values
Simulate a four-bar model at different coupler link lengths and plot the resulting coupler curves. - Sensing
Dynamic variables that you can sense and blocks that you can use to sense them. - Sense Motion Using a Transform Sensor Block
Use the Transform Sensor block to sense frame motion in a simple multibody model. - Measure Joint Constraint Forces
Use the sensing capability of a joint block to sense the internal forces acting on a mechanical link. - Measure Forces and Torques Acting at Joints
Use the sensing capability of joint blocks to measure the forces and torques acting at a joint.
规定力、扭矩和运动输入
- Modeling Contact Force Between Two Solids
Use the Spatial Contact Force block to model normal and frictional forces between solid blocks. - Solid Cylinder Rolling Down an Incline
Use the Spatial Contact Force block to model the solid cylinder rolling down a ramp. - Model Gravity in a Planetary System
Assemble a system of gravitationally-bound free bodies using Cartesian Joint and Gravitational Field blocks. - Specify Joint Motion in Planar Manipulator Model
Use the actuation capability of joint blocks to specify the trajectory of frame. - Specify Joint Actuation Torque
Use the actuation capability of a joint block to specify the actuation torque on a joint. - Specify Joint Motion Profile
Use the actuation capability of joint blocks to specify the trajectory of a frame. - Use Contact Proxies to Simulate Contact
Use contact proxies to increase the speed and robustness of contact simulations.
力和扭矩设定
- Actuating and Sensing with Physical Signals
Using physical signals to specify actuation inputs and obtain sensing outputs. - Joint Actuation Limitations
Restrictions and special considerations for models with motion actuation inputs in joint blocks. - Modeling and Measuring System Dynamics
Workflow steps for setting and sensing dynamic quantities such as force, torque, position, and more. - Modeling Gravity
Modeling the effects of uniform gravity, gravitational fields, and individual gravitational forces. Software definition of body boundaries and its impact on gravitational torques. - Specifying Joint Actuation Inputs
Joint actuation modes, motion input handling, and key differences between model assembly and simulation.
运动、力和扭矩感测
- Force and Torque Sensing
Forces and torques that you can sense and the blocks that you can use to sense them. - Selecting a Measurement Frame
Measurement frame definition and summary of measurement frame types. - Motion Sensing
Motion variables that you can sense and the blocks that you can use to sense them. - Rotational Measurements
Rotational motion variables that you can sense and the blocks that you can use to sense them. - Translational Measurements
Translational variables that you can sense and the blocks that you can use to sense them.
精选示例

Backhoe
Model a hydraulically actuated backhoe with closed-loop PID control.
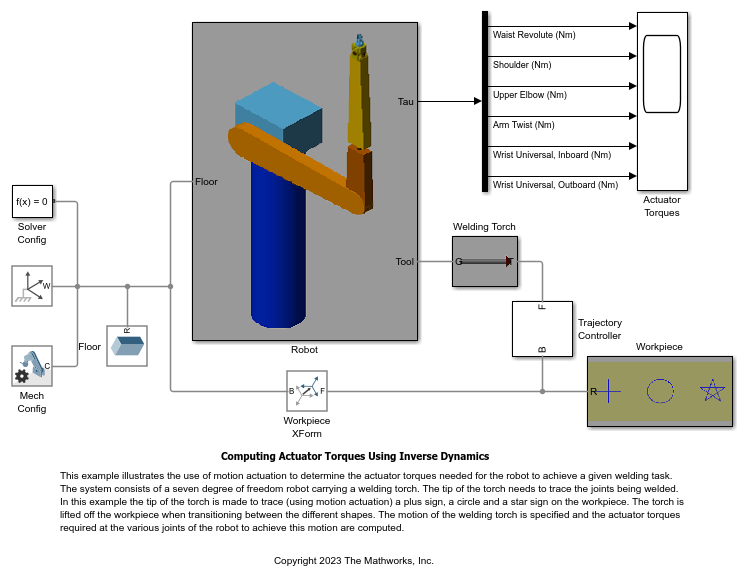
Computing Actuator Torques Using Inverse Dynamics
Illustrates the use of motion actuation to determine the actuator torques needed for the robot to achieve a given welding task. The system consists of a seven degree of freedom robot carrying a welding torch. The tip of the torch needs to trace the joints being welded. In this example the tip of the torch is made to trace (using motion actuation) a plus sign, a circle and a star sign on the workpiece. The torch is lifted off the workpiece when transitioning between the different shapes. The motion of the welding torch is specified and the actuator torques required at the various joints of the robot to achieve this motion is computed.
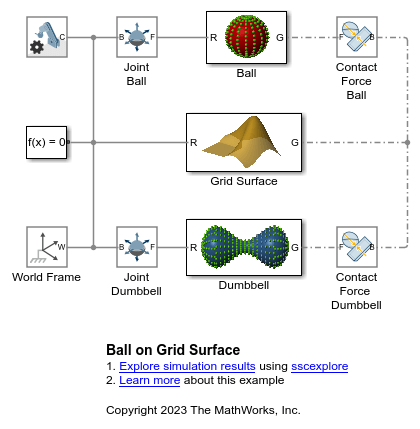
Contact Modeling - Ball on Grid Surface
A ball and dumbbell rolling down on an L-shaped surface. Grid Surface block is used to generate the L-shaped membrane. Point Cloud blocks are used to model the contact between the ball/dumbbell and the surface. The number of point blocks can be controlled by varying the point cloud density. This example demonstrates the capabilities of Grid Surface and Point Cloud blocks to model contacts between complex shaped bodies.
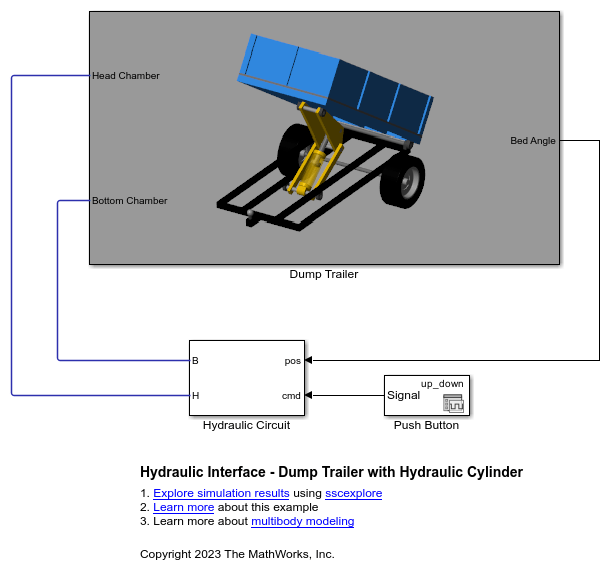
Hydraulic Interface - Dump Trailer with Hydraulic Cylinder
A dump trailer powered by a double-acting hydraulic cylinder. The cylinder actuates a scissor hoist mechanism that raises and lowers the dump bed. The model provides an example of how to interface Simscape™ Multibody™ joints with Simscape components that have mechanical domain ports.
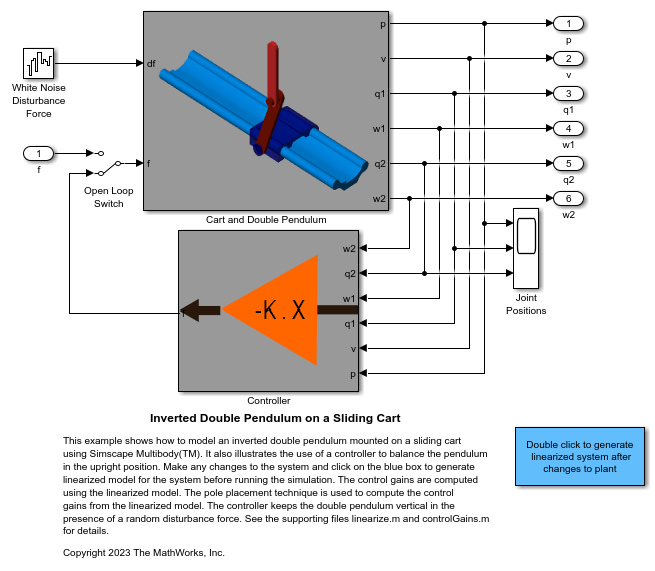
Inverted Double Pendulum on a Sliding Cart
Model an inverted double pendulum mounted on a sliding cart using Simscape™ Multibody™. It also illustrates the use of a controller to balance the pendulum in the upright position. Make any changes to the system and click on the blue box to generate a linearized model for the system before running the simulation. The control gains are computed using the linearized model. The pole placement technique is used to compute the control gains from the linearized model. The controller keeps the double pendulum vertical in the presence of a random disturbance force. See the supporting files linearize.m and controlGains.m for details.
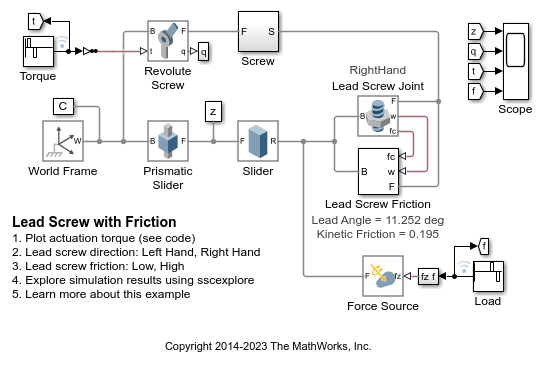
Lead Screw with Friction
Models a lead screw with friction. The constraint force in the lead screw is measured and used to calculate the friction torque within the lead screw. A continuous stick-slip friction model is used to determine the coefficient of friction based on the relative rotational speed of the two parts connected by the lead screw.
Measure Inertial Properties of Multibody Systems
Measure the inertial properties, such as mass
and center of mass, of a group of bodies or an entire mechanism by using the
Inertia Sensor block.
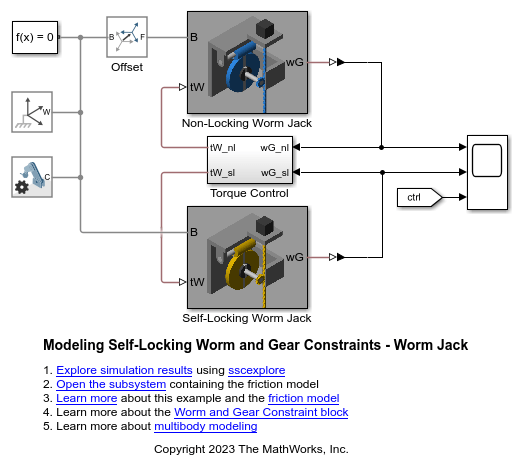
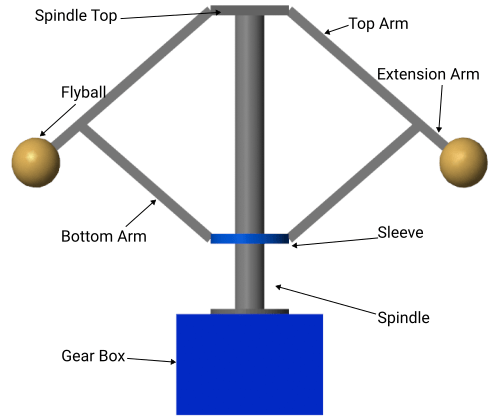
Modeling Self-Locking Worm and Gear Constraints - Worm Jack
Models a self-locking worm and gear constraint. The model shows a mechanical jack driven by a torque applied to a worm. The model includes two worm jack subsystems identical in every sense except for the value of the worm lead angle. Both subsystems have friction models applied to their Worm and Gear Constraint blocks.
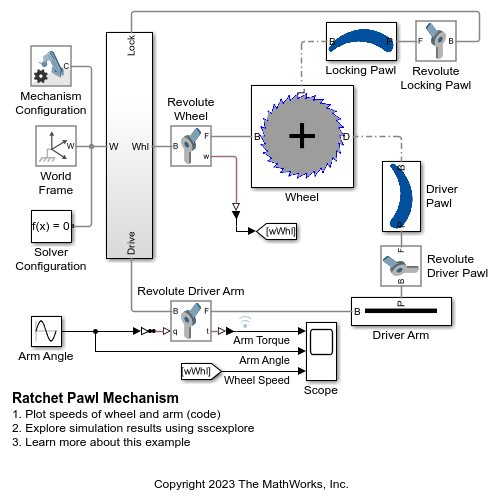
Ratchet Pawl Mechanism
Models a ratchet with a locking pawl. The arm pushes the driving pawl to rotate the ratchet wheel. The locking pawl holds the ratchet wheel in place while the arm reverses direction. Planar contact modeling geometry is used to streamline computation.
Ratchet Lifter
Models a ratchet lifter and demonstrates how to use contact proxies for contact problems that involve complex geometries.
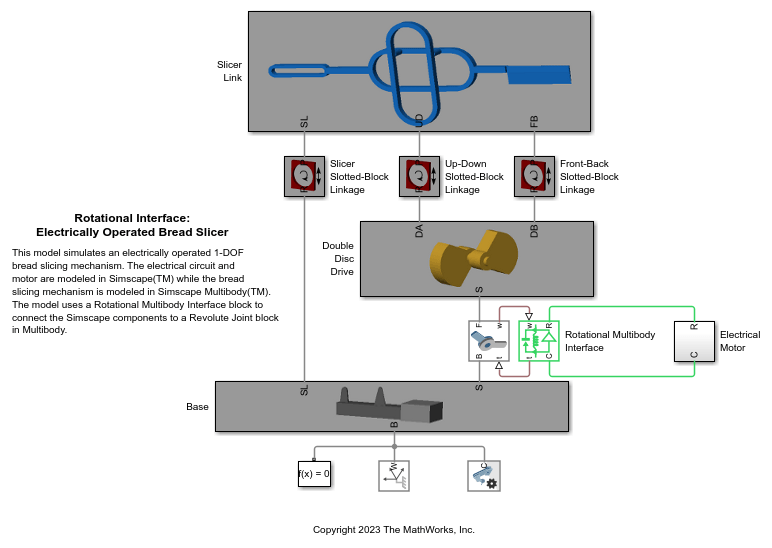
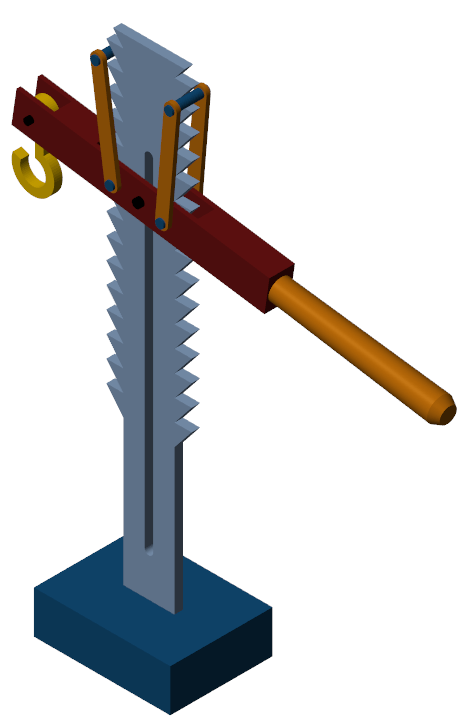
Rotational Interface: Electrically Operated Bread Slicer
This model simulates an electrically operated 1-DOF bread slicing mechanism. The electrical circuit and motor are modeled in Simscape™ while the bread slicing mechanism is modeled in Simscape Multibody™. The model uses a Rotational Multibody Interface block to connect the Simscape components to a Revolute Joint block in Multibody.
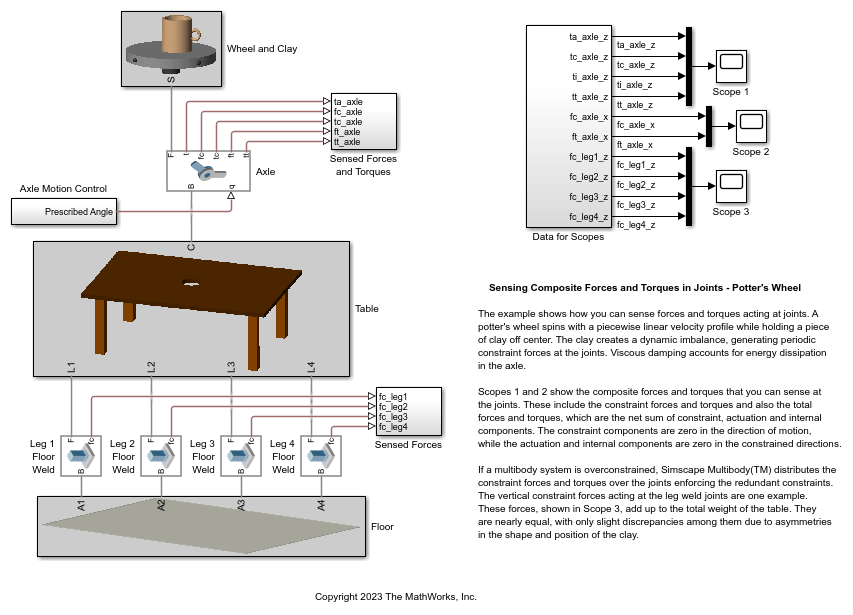
Sensing Composite Forces and Torques in Joints - Potter's Wheel
The example shows how you can sense forces and torques acting at joints. A potter's wheel spins with a piecewise linear velocity profile while holding a piece of clay off center. The clay creates a dynamic imbalance, generating periodic constraint forces at the joints. Viscous damping accounts for energy dissipation in the axle.
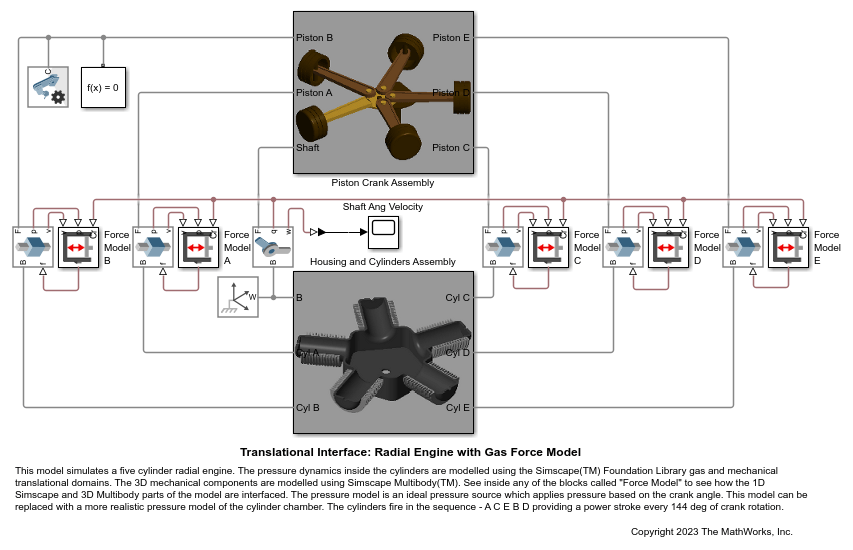
Translational Interface: Radial Engine with Gas Force Model
This model simulates a five cylinder radial engine. The pressure dynamics inside the cylinders are modeled using the Simscape™ Foundation Library gas and mechanical translational domains. The 3D mechanical components are modeled using Simscape Multibody™. See inside any of the blocks called "Force Model" to see how the 1D Simscape and 3D Multibody parts of the model are interfaced. The pressure model is an ideal pressure source which applies pressure based on the crank angle. This model can be replaced with a more realistic pressure model of the cylinder chamber. The cylinders fire in the sequence - A C E B D providing a power stroke every 144 deg of crank rotation.
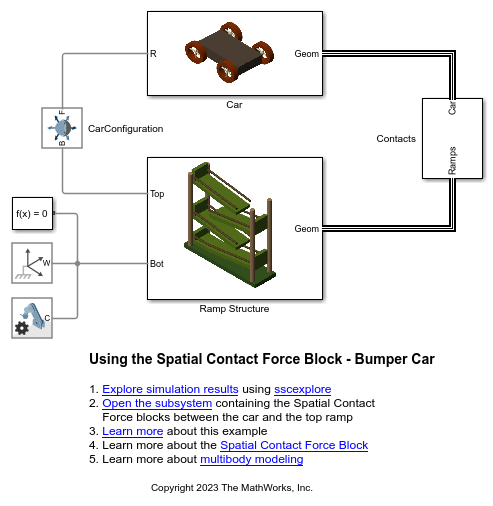
Using the Spatial Contact Force Block - Bumper Car
A toy bumper car traveling down a series of ramps while undergoing intermittent collisions. Spatial Contact Force blocks are used to model the friction and normal forces between every pair of geometries that may potentially come into contact during the simulation (e.g., between one of the car's wheels and a railing). Each Spatial Contact Force block is able to generate brief high-impact contact forces to model collisions, as well as sustained contact forces to model rolling and sliding.
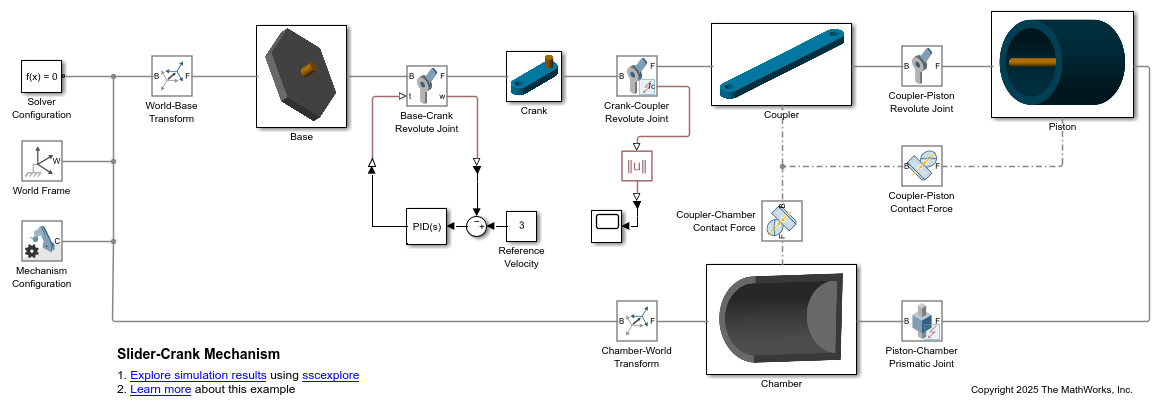
Model Joint Mode Faults - Slider-Crank Mechanism
Demonstrates how to model joint mode faults in a slider-crank mechanism using Simscape™ Multibody™.