Gearbox
Ideal rotational gearbox
Libraries:
Powertrain Blockset /
Drivetrain /
Couplings
Description
The Gearbox block implements an ideal rotational gearbox. The block uses the gear inertias and damping to calculate the velocity response to the base and follower gear pair input torques.
In fuel economy and powertrain efficiency studies, you can use the Gearbox block to model ideal gear coupling and the power transfer between common driveline elements such as transmissions, engines, clutches, and differentials.
The Gearbox block uses these equations to approximate the transmission dynamics.
This constraint equation reduces the system to a one DOF system.
To express the ideal torque transfer, the block uses this relationship.
Efficiency
To account for the block efficiency, use the Efficiency factors parameter. This table summarizes the block implementation for each setting.
| Setting | Implementation |
|---|---|
| Constant efficiency that you can set with the Constant efficiency factor, eta parameter. |
| Efficiency as a function of base gear input torque, air temperature, and driveshaft speed. Use these parameters to specify the lookup table and breakpoints:
For the air temperature, you can either:
To select the interpolation method, use the Interpolation method parameter. For more information, see Interpolation Methods. |
Power Accounting
For the power accounting, the block implements these equations.
| Bus Signal | Description | Variable | Equations | ||
|---|---|---|---|---|---|
|
|
| Mechanical power from base shaft | PBase | |
PwrFlwr | Mechanical power from follower shaft | PFlwr | |||
|
| PwrMechLoss | Total power loss | Png | ||
PwrDampLoss | Power loss due to damping | Pd | |||
|
| PwrStoredShft | Rate change of stored internal kinetic energy | Ps | ||
The equations use these variables.
| TB | Base gear input torque |
| TF | Follower gear output torque |
| ωB | Base gear angular velocity |
| ωF | Follower gear angular velocity |
| JB | Base gear rotational inertia |
| JF | Follower gear rotational inertia |
| bB | Base gear rotational viscous damping |
| bF | Follower gear rotational viscous damping |
| N | Torque transmission gear ratio |
| η | Gear efficiency |
| Pt | Total power |
| Pd | Power loss due to damping |
| Ps | Rate change of stored internal kinetic energy |
Examples
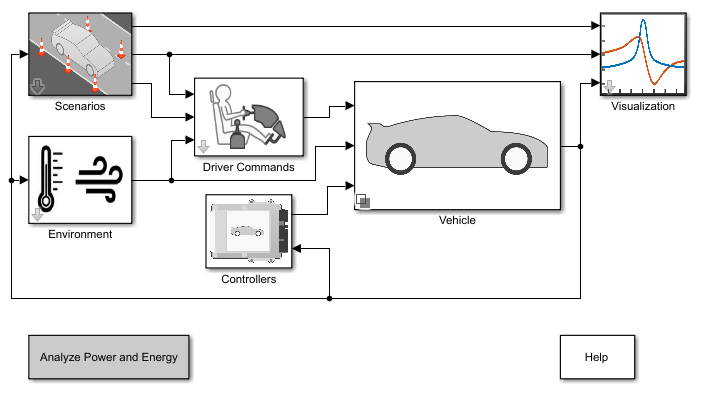
Build Conventional Vehicle Model
Build a vehicle with an internal combustion engine using the conventional vehicle reference application.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2017a