General CRC Syndrome Detector HDL Optimized
Detect errors in input data using CRC
Libraries:
Communications Toolbox HDL Support /
Error Detection and Correction /
CRC
Description
The General CRC Syndrome Detector HDL Optimized block performs a cyclic redundancy check (CRC) on data and compares the resulting checksum with the appended checksum. The General CRC Syndrome Detector HDL Optimized block processing is optimized for HDL code generation. If the two checksums do not match, the block reports an error. Instead of processing an entire frame at once, the block accepts and returns a data sample stream with accompanying control signals. The control signals indicate the validity of the samples and the boundaries of the frame. To achieve higher throughput, the block accepts vector data up to the CRC length and implements a parallel architecture.
Examples
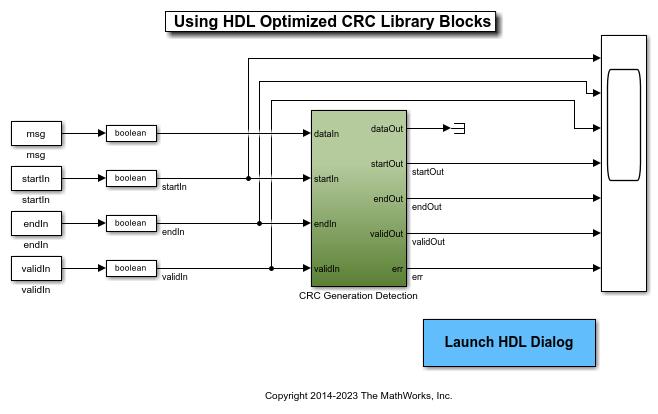
Using HDL Optimized CRC Library Blocks
Model the CRC-CCITT used in the IEEE® 802.11™ standard by using HDL optimized general CRC generator and syndrome detectors Simulink® blocks.
Ports
Input
Output
Parameters
Algorithms
When you use vector or integer input, the block implements a parallel CRC algorithm [1].
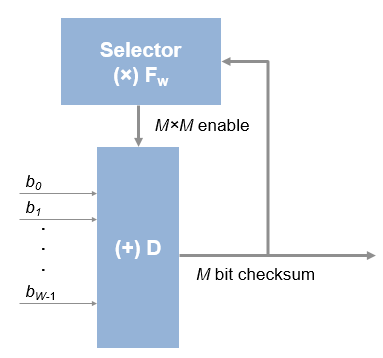
To provide high throughput for modern communications systems, the block implements the CRC algorithm with a parallel architecture. This architecture recursively calculates M bits of a CRC checksum for each W input bits. At the end of the frame, the final checksum result is appended to the message. For a polynomial length of M, the recursive checksum calculation for W bits in parallel is
FW is an M-by-M matrix that selects elements of the current state for the polynomial calculation with the new input bits. D is an M-element vector that provides the new input bits, ordered in relation to the generator polynomial and padded with zeros. The block implements the (×) with logical AND and (+) with logical XOR.
This waveform shows streaming data and the accompanying control signals for a CRC16 with 8-bit binary vector input. The input frames are contiguous. The output frames include space between them because the detector block removes the checksum word.

This waveform diagram shows continuous input data. Non-continuous data is also supported.
References
[1] Campobello, G., G. Patane, and M. Russo. “Parallel Crc Realization.” IEEE Transactions on Computers 52, no. 10 (October 2003): 1312–19. https://doi.org/10.1109/TC.2003.1234528.
Extended Capabilities
Version History
Introduced in R2012b