在 Simulink 中设计 LQR 伺服控制器
此示例说明在 Simulink® 中使用飞机自动驾驶应用程序设计 LQR 伺服控制器。
打开飞机模型。
open_system("lqrpilot")
在此模型中:
Linearized Dynamics模块包含线性化的弹体。sf_aerodyn是一个 S-Function 模块,其中包含 的非线性方程。和 之间的误差信号通过积分器传递,这有助于将误差降至零。
打开模型还会加载 lqrpilotData MAT 文件,该文件包含以下数据。
状态方程矩阵
A和B线性化状态矩阵
A15最终 LQG 增益矩阵
K_lqr
飞机状态空间方程
该方程是一个状态空间系统的标准状态方程。
对于飞机系统,状态向量如下。
变量 、 和 是相对于机身主体框架的三个速度,如下图所示。
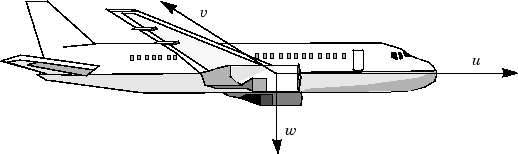
变量 和 是滚转角和俯仰角。、 和 分别是滚转、俯仰和偏航率。
机身动态特性是非线性的。以下方程显示添加到状态空间方程中的非线性分量,其中 是重力加速度。
配平
出于 LQG 设计的目的,非线性动态特性在 和 、、 和 设置为零时配平。由于 、 和 不影响前面方程中的非线性项,因此结果是在 处线性化的模型,所有其余状态均设置为零。
lqrdes 脚本显示如何在此配平的工作点处计算线性化模型 A15。
问题定义
设计的目标是实现稳定协调的转弯,如下图所示。

为了实现此目标,您必须设计一个控制器,使飞机通过 60° 滚转来实现稳定转弯指令。此外,假设俯仰角 必须尽可能接近于零。
结果
lqrdes 脚本显示如何计算 LQG 增益矩阵 K_lqr。
在 lqrpilot 模型中,确保 Switch 模块配置为选择 Nonlinear Dynamics 模块的输出。
运行模型。
sim("lqrpilot")查看滚转 对 60° 阶跃变化的响应。系统在大约 60 秒内跟踪滚转角指令。
open_system("lqrpilot/phi (roll angle)")

查看俯仰角 。控制器能够保持俯仰角相对较小。
open_system("lqrpilot/theta (pitch angle)")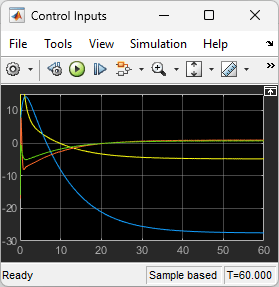

最后,查看控制输入。
open_system("lqrpilot/Control Inputs")

您可以在 lqrdes 脚本中调整 Q 和 R 值以尝试不同设计方案。您还可以比较线性和非线性系统动态特性的仿真,以了解非线性对系统性能的影响。