getLFTModel
Decompose generalized LTI model
Syntax
Description
[
decomposes the Generalized
matrix or Generalized LTI
model M into the components H,B,S] = getLFTModel(M)H,
B, and S. The H,
B, and S components relate to
M as shown in this figure. For more information, see Internal Structure of Generalized Models.
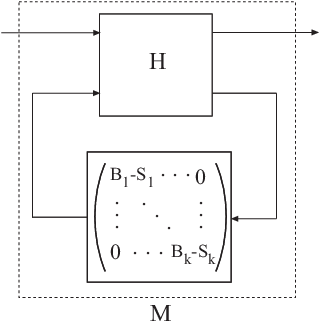
You can recombine H, B, and
S into M by using the lft function.
M = lft(H,blkdiag(B{:})-S);Examples
Input Arguments
Output Arguments
Version History
Introduced in R2011a