sminDAE
Reduce algebraic states in sparse state-space models while preserving sparsity
Since R2024b
Description
rsys = sminDAE(sys)sys while
preserving sparsity. The sparsity of the dynamic portion of
(A,E) or
(M,C,K) is unchanged and fill-in
in the remaining matrices is kept in check.
In canonical DAE form:
the algebraic states are the entries of x2. In
general, sys has algebraic states if E or
M is singular. Such models represent differential algebraic equations
(DAEs).
rsys = sminDAE(sys,FillFactor)
Examples
This example shows how to use sminDAE to reduce algebraic states in sparse models.
For this example, consider a sparse state-space model containing extra algebraic states. Load the model.
load sysDAE.mat
size(sys)Sparse state-space model with 1 outputs, 1 inputs, and 17 states.
Typically, signal-based connections and physical interfaces between model components gives rise to differential algebraic equation (DAE) models where some internal signals and forces become extra states To see if you can eliminate these states while preserving sparsity, you can use sminDAE.
rsys = sminDAE(sys)
Sparse continuous-time state-space model with 1 outputs, 1 inputs, and 15 states. Model Properties Use "spy" and "showStateInfo" to inspect model structure. Type "help sparssOptions" for available solver options for this model.
For this model, the function eliminates two states. Compare the response of two models.
bodeplot(sys,rsys,"--",logspace(-3,3,100))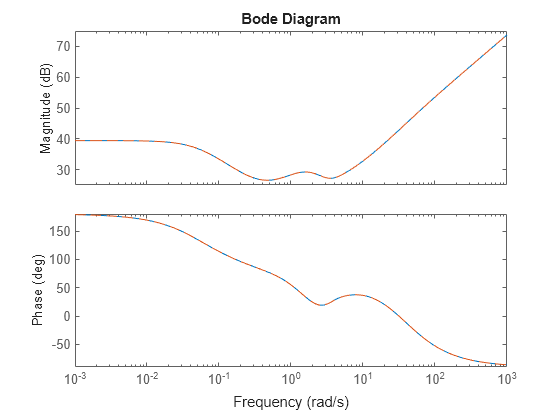
Input Arguments
Output Arguments
Version History
Introduced in R2024b