TuningGoal.Transient
Transient matching requirement for control system tuning
Description
Use the TuningGoal.Transient object to
constrain the transient response from specified inputs to specified outputs. This tuning
goal specifies that the transient response closely match the response of a reference
model. Specify the closeness of the required match using the RelGap
property of the tuning goal (see Properties). You can constrain the response to an
impulse, step, or ramp input signal. You can also constrain the response to an input
signal given by the impulse response of an input filter you specify.
Creation
Syntax
Description
Req = TuningGoal.Transient(inputname,outputname,refsys)inputname to
outputname closely matches the impulse response of
the reference model refsys. Specify the closeness of
the required match using the RelGap property of the
tuning goal (see Properties).
inputname and outputname can
describe a SISO or MIMO response of your control system. For MIMO responses,
the number of inputs must equal the number of outputs.
Req = TuningGoal.Transient(inputname,outputname,refsys,inputtype)
Req = TuningGoal.Transient(inputname,outputname,refsys,inputfilter)inputfilter, that is the Laplace transform of
the desired time-domain input signal. The impulse response of
inputfilter is the desired input signal.
Input Arguments
If you are using the tuning goal to tune a generalized state-space (
genss) model of a control system, theninputnamecan include:Any input of the
genssmodelAny
AnalysisPointlocation in the control system model
For example, if you are tuning a control system model,
T, theninputnamecan be any input name inT.InputName. Also, ifTcontains anAnalysisPointblock with a location namedAP_u, theninputnamecan include'AP_u'. UsegetPointsto get a list of analysis points available in agenssmodel.If
inputnameis anAnalysisPointlocation of a generalized model, the input signal for the tuning goal is the implied input associated with theAnalysisPointblock:
For more information about analysis points in control system models, see Mark Signals of Interest for Control System Analysis and Design.
If you are using the tuning goal to tune a generalized state-space (
genss) model of a control system, thenoutputnamecan include:Any output of the
genssmodelAny
AnalysisPointlocation in the control system model
For example, if you are tuning a control system model,
T, thenoutputnamecan be any output name inT.OutputName. Also, ifTcontains anAnalysisPointblock with a location namedAP_u, thenoutputnamecan include'AP_u'. UsegetPointsto get a list of analysis points available in agenssmodel.If
outputnameis anAnalysisPointlocation of a generalized model, the output signal for the tuning goal is the implied output associated with theAnalysisPointblock:
For more information about analysis points in control system models, see Mark Signals of Interest for Control System Analysis and Design.
Reference system for target transient response, specified as a dynamic
system model, such as a tf, zpk,
or ss model. The desired transient response is the
response of this model to the input signal specified by
inputtype or inputfilter.
The reference model must be stable, and the series connection of the
reference model with the input shaping filter must have no feedthrough
term.
Type of input signal that generates the constrained transient response, specified as one of the following values:
'impulse'— Constrain the response atoutputnameto a unit impulse applied atinputname.'step'— Constrain the response to a unit step. Using'step'is equivalent to using theTuningGoal.StepTrackingdesign goal.'ramp'— Constrain the response to a unit ramp,u = t.
Custom input signal for generating the transient response, specified
as a SISO transfer function (tf or
zpk) model that represents the Laplace
transform of the desired input signal. inputfilter
must be continuous, and can have no poles in the open right-half plane.
The frequency response of inputfilter gives the
signal spectrum of the desired input signal, and the impulse response of
inputfilter is the time-domain input signal.
For example, to constrain the transient response to a unit-amplitude
sine wave of frequency w, set
inputfilter to
tf(w,[1,0,w^2]). This transfer function is the
Laplace transform of sin(wt).
The series connection of refsys with
inputfilter must have no feedthrough
term.
Properties
Examples
Create a requirement for the transient response from a signal named 'r' to a signal named 'u'. Constrain the impulse response to match the response of transfer function , but allow 20% relative variation between the target and tuned responses.
refsys = tf(1,[1 1]); Req1 = TuningGoal.Transient('r','u',refsys);
When you do not specify a response type, the requirement constrains the transient response. By default, the requirement allows a relative gap of 0.1 between the target and tuned responses. To change the relative gap to 20%, set the RelGap property of the requirement.
Req1.RelGap = 0.2;
Examine the requirement.
viewGoal(Req1)
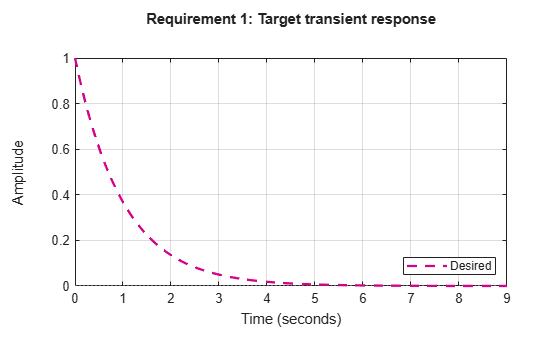
The dashed line shows the target impulse response specified by this requirement. You can use this requirement to tune a control system model, T, that contains valid input and output locations named 'r' and 'u'. If you do so, the command viewGoal(Req1,T) plots the achieved impulse response from 'r' to 'u' for comparison to the target response.
Create a requirement that constrains the response to a step input, instead of the impulse response.
Req2 = TuningGoal.Transient('r','u',refsys,'step');
Examine this requirement.
viewGoal(Req2)
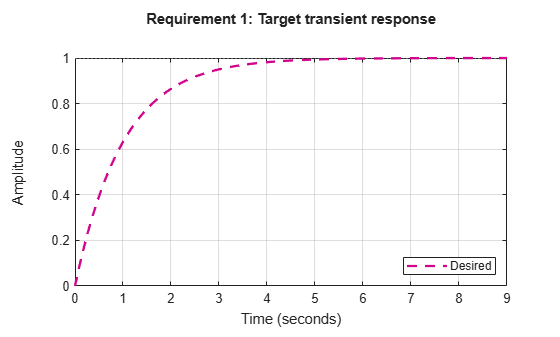
Req2 is equivalent to the following step tracking requirement:
Req3 = TuningGoal.StepTracking('r','u',refsys);
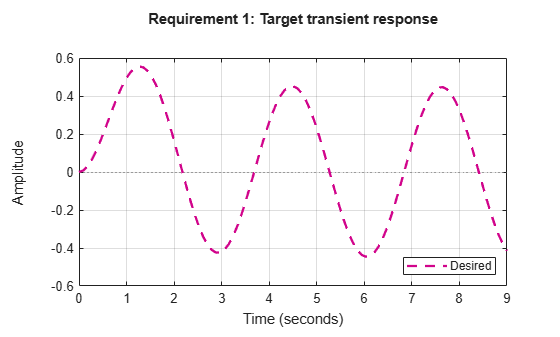
Create a requirement for the transient response from 'r' to 'u'. Constrain the response to a sinusoidal input signal, rather than to an input, step, or ramp.
To specify a custom input signal, set the input filter to the Laplace transform of the desired signal. For example, suppose you want to constrain the response to a signal of . The Laplace transform of this signal is given by:
Create a requirement that constrains the response at 'u' to a sinusoidal input of natural frequency 2 rad/s at 'r'. The response should match that of the reference system .
refsys = tf(1,[1 1]); w = 2; inputfilter = tf(w,[1 0 w^2]); Req = TuningGoal.Transient('u','r',refsys,inputfilter);
Examine the requirement to see the shape of the target response.
viewGoal(Req)
Create a tuning goal that constrains the impulse response. Set the
Models and Openings properties to
further configure the tuning goal’s applicability.
refsys = tf(1,[1 1]); Req = TuningGoal.Transient('r','u',refsys); Req.Models = [2 3]; Req.Openings = 'OuterLoop'
When tuning a control system that has an input (or analysis point)
'r', an output (or analysis point)
'u', and another analysis point at location
'OuterLoop', you can use Req as an
input to looptune or systune. Setting
the Openings property specifies that the impulse response
from 'r' to 'y' is computed with the
loop opened at 'OuterLoop'. When tuning an array of
control system models, setting the Models property
restricts how the tuning goal is applied. In this example, the tuning goal
applies only to the second and third models in an array.
Tips
When you use this tuning goal to tune a continuous-time control system,
systuneattempts to enforce zero feedthrough (D = 0) on the transfer that the tuning goal constrains. Zero feedthrough is imposed because the H2 norm, and therefore the value of the tuning goal (see Algorithms), is infinite for continuous-time systems with nonzero feedthrough.systuneenforces zero feedthrough by fixing to zero all tunable parameters that contribute to the feedthrough term.systunereturns an error when fixing these tunable parameters is insufficient to enforce zero feedthrough. In such cases, you must modify the tuning goal or the control structure, or manually fix some tunable parameters of your system to values that eliminate the feedthrough term.When the constrained transfer function has several tunable blocks in series, the software’s approach of zeroing all parameters that contribute to the overall feedthrough might be conservative. In that case, it is sufficient to zero the feedthrough term of one of the blocks. If you want to control which block has feedthrough fixed to zero, you can manually fix the feedthrough of the tuned block of your choice.
To fix parameters of tunable blocks to specified values, use the
ValueandFreeproperties of the block parameterization. For example, consider a tuned state-space block:C = tunableSS('C',1,2,3);To enforce zero feedthrough on this block, set its D matrix value to zero, and fix the parameter.
C.D.Value = 0; C.D.Free = false;
For more information on fixing parameter values, see the Control Design Block reference pages, such as
tunableSS.This tuning goal imposes an implicit stability constraint on the closed-loop transfer function from
InputtoOutput, evaluated with loops opened at the points identified inOpenings. The dynamics affected by this implicit constraint are the stabilized dynamics for this tuning goal. TheMinDecayandMaxRadiusoptions ofsystuneOptionscontrol the bounds on these implicitly constrained dynamics. If the optimization fails to meet the default bounds, or if the default bounds conflict with other requirements, usesystuneOptionsto change these defaults.
Algorithms
When you tune a control system using a TuningGoal, the software
converts the tuning goal into a normalized scalar value
f(x), where x is the vector
of free (tunable) parameters in the control system. The software then adjusts the
parameter values to minimize f(x) or to drive
f(x) below 1 if the tuning goal is a hard
constraint.
For TuningGoal.Transient,
f(x) is based upon the relative gap between the
tuned response and the target response:
y(t) – yref(t) is the response mismatch, and 1 – yref(tr)(t) is the transient portion of yref (deviation from steady-state value or trajectory). denotes the signal energy (2-norm). The gap can be understood as the ratio of the root-mean-square (RMS) of the mismatch to the RMS of the reference transient
Version History
Introduced in R2014bSee Also
looptune | systune | systune (for slTuner) (Simulink Control Design) | looptune (for slTuner) (Simulink Control Design) | viewGoal | evalGoal | TuningGoal.StepTracking | TuningGoal.StepRejection | slTuner (Simulink Control Design)