lateralControllerStanley
Compute steering angle command for path following by using Stanley method
Syntax
Description
steerCmd = lateralControllerStanley(refPose,currPose,currVelocity)
The controller computes the steering angle command using the Stanley method [1], whose control law is based on a kinematic bicycle model. Use this controller for path following in low-speed environments, where inertial effects are minimal.
steerCmd = lateralControllerStanley(refPose,currPose,currVelocity,Name,Value)lateralControllerStanley(refPose,currPose,currVelocity,'Direction',-1)
computes the steering angle command for a vehicle in reverse motion.
Examples
Input Arguments
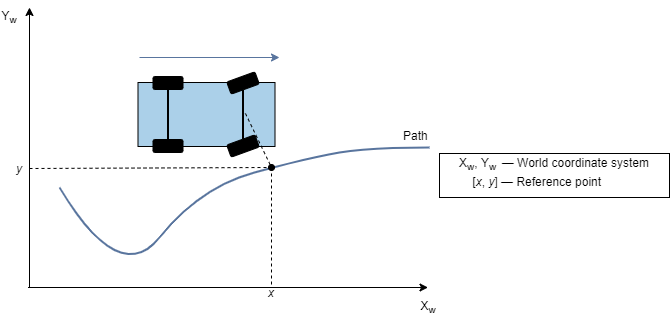
Reference pose, specified as an [x, y, Θ] vector. x and y are in meters, and Θ is in degrees.
x and y specify the reference point to steer the vehicle toward. Θ specifies the orientation angle of the path at this reference point and is positive in the counterclockwise direction.
For a vehicle in forward motion, the reference point is the point on the path that is closest to the center of the vehicle's front axle.
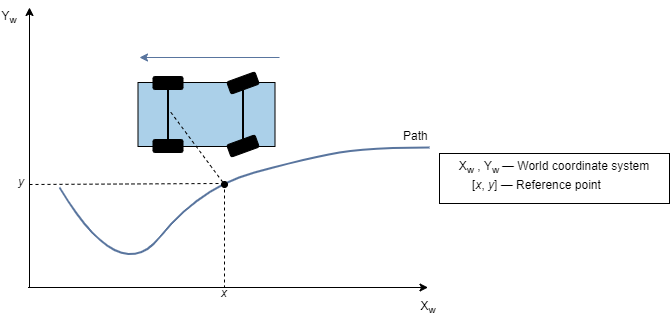
For a vehicle in reverse motion, the reference point is the point on the path that is closest to the center of the vehicle's rear axle.
Data Types: single | double
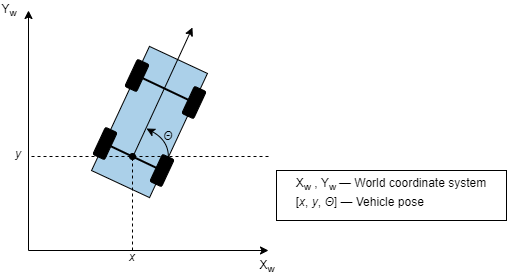
Current pose of the vehicle, specified as an [x, y, Θ] vector. x and y are in meters, and Θ is in degrees.
x and y specify the location of the vehicle, which is defined as the center of the vehicle's rear axle.
Θ specifies the orientation angle of the vehicle at location (x,y) and is positive in the counterclockwise direction.
For more details on vehicle pose, see Coordinate Systems in Automated Driving Toolbox.
Data Types: single | double
Current longitudinal velocity of the vehicle, specified as a real scalar. Units are in meters per second.
If the vehicle is in forward motion, then this value must be greater than 0.
If the vehicle is in reverse motion, then this value must be less than 0.
A value of 0 represents a vehicle that is not in motion.
Data Types: single | double
Name-Value Arguments
Output Arguments
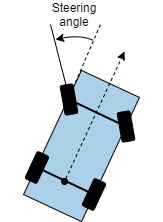
Steering angle command, in degrees, returned as a real scalar. This value is positive in the counterclockwise direction.
For more details, see Coordinate Systems in Automated Driving Toolbox.
Algorithms
To compute the steering angle command, the controller minimizes the position error and the angle error of the current pose with respect to the reference pose. The driving direction of the vehicle determines these error values.
When the vehicle is in forward motion ('Direction' name-value pair is
1):
The position error is the lateral distance from the center of the front axle to the reference point on the path.
The angle error is the angle of the front wheel with respect to reference path.
When the vehicle is in reverse motion ('Direction' name-value pair is
-1):
The position error is the lateral distance from the center of the rear axle to the reference point on the path.
The angle error is the angle of the rear wheel with respect to reference path.
For details on how the controller minimizes these errors, see [1].
References
[1] Hoffmann, Gabriel M., Claire J. Tomlin, Michael Montemerlo, and Sebastian Thrun. "Autonomous Automobile Trajectory Tracking for Off-Road Driving: Controller Design, Experimental Validation and Racing." American Control Conference. 2007, pp. 2296–2301. doi:10.1109/ACC.2007.4282788
Extended Capabilities
Version History
Introduced in R2018b