exportToDrivingScenario
Syntax
Description
Add-On Required: This feature requires the Scenario Builder for Automated Driving Toolbox add-on.
outputScenario = exportToDrivingScenario(trajectory)trajectory to driving scenario
outputScenario.
outputScenario = exportToDrivingScenario(trajectory,inputScenario)trajectory into the input scenario
inputScenario and returns the updated scenario
outputScenario.
outputScenario = exportToDrivingScenario(___,Name=Value)AssetType="Bicycle" exports a bicycle actor to driving scenario.
Examples
Load recorded GPS trajectory data into the workspace.
load("recordedGPSData.mat","X","Y","Z","timestamps")
Create a trajectory object by using the loaded timestamps and xyz-coordinates.
traj = scenariobuilder.Trajectory(timestamps,X,Y,Z);
Normalize timestamps of trajectory object.
normalizeTimestamps(traj)
Smooth the trajectory in the trajectory object.
smooth(traj)
Export the trajectory to driving scenario.
scenario = exportToDrivingScenario(traj)
scenario =
drivingScenario with properties:
SampleTime: 0.0500
StopTime: 19.5498
SimulationTime: 0
IsRunning: 1
Actors: [1×1 driving.scenario.Vehicle]
Barriers: [0×0 driving.scenario.Barrier]
ParkingLots: [0×0 driving.scenario.ParkingLot]
Add a 6 meter width road along the waypoints.
road(scenario,traj.Position,6);
Visualize the driving scenario.
restart(scenario) chasePlot(scenario.Actors,Centerline="on") while advance(scenario) pause(0.01) end
Load recorded GPS data into the workspace.
load("recordedGPSData.mat","latitudes","longitudes","altitudes","timestamps")
Initialize a GPSData object using the information from the GPS data.
gpsData = scenariobuilder.GPSData(timestamps,latitudes,longitudes,altitudes)
gpsData =
GPSData with properties:
Name: ''
NumSamples: 392
Duration: 19.5498
SampleRate: 20.0513
SampleTime: 0.0500
Timestamps: [392×1 double]
Latitude: [392×1 single]
Longitude: [392×1 single]
Altitude: [392×1 single]
Attributes: []
Create a trajectory object from GPS data object.
traj = trajectory(gpsData)
traj =
Trajectory with properties:
Name: ''
NumSamples: 392
Duration: 19.5498
SampleRate: 20.0513
SampleTime: 0.0500
Timestamps: [392×1 double]
Position: [392×3 double]
Orientation: [392×3 double]
Velocity: [392×3 double]
Course: [392×1 double]
GroundSpeed: [392×1 double]
Acceleration: [392×3 double]
AngularVelocity: [392×3 double]
LocalOrigin: [45.5278 -122.6556 0]
TimeOrigin: 1.4616e+09
Attributes: []
Smooth the trajectory in the trajectory object.
smooth(traj)
Use the latitude and longitude to fetch the map parameters.
mapParameters = getMapROI(gpsData.Latitude,gpsData.Longitude);
Use the osmUrl parameter in the mapParameters output structure to import and save the OpenStreetMap® file.
fileName = websave("drive_map.osm",mapParameters.osmUrl, ... weboptions(ContentType="xml"));
Export the trajectory and the imported OpenStreetMap road network to driving scenario.
scenario = exportToDrivingScenario(traj,"RoadNetworkSource","OpenStreetMap",FileName=fileName);
Visualize the driving scenario.
restart(scenario) chasePlot(scenario.Actors,Centerline="on") while advance(scenario) pause(0.01) end

Input Arguments
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Example: exportToDrivingScenario(trajectory,Color="blue") exports a
blue color actor to driving scenario.
Name of the actor in driving scenario, specified as a string scalar or character
vector. driving scenario uses the name specified by this argument for the actor it
associates with your exported trajectory. By default, the function assigns the name
for the actor as vehicle. For an existing actor with name
Name, the function appends an incremental numeric integer at
the end of the name. For example, if an actor with name vehicle
already exists, the function names the actor as vehicle1
instead.
Example: Name="Actor1" specifies the name of the actor as
Actor1.
Data Types: char | string
Color of the actor in driving scenario, specified as "auto", a
string scalar, or character vector corresponding to an SVG 1.0 color name, such as
"blue", a 3-element row vector of values in the range
[0,1], where the values correspond to the
intensities of the red, green, and blue components of color, respectively, or a
hexadecimal color code, such as "#0072BD". Driving scenario uses
the color specified by this argument for the actor it associates with your exported
trajectory. By default, the function automatically assigns a color for the
actor.
This table lists the valid color names with the equivalent RGB triplets and hexadecimal color codes.
| Color Name | Short Name | RGB Triplet | Hexadecimal Color Code | Appearance |
|---|---|---|---|---|
"red" | "r" | [1 0 0] | "#FF0000" |
|
"green" | "g" | [0 1 0] | "#00FF00" |
|
"blue" | "b" | [0 0 1] | "#0000FF" |
|
"cyan"
| "c" | [0 1 1] | "#00FFFF" |
|
"magenta" | "m" | [1 0 1] | "#FF00FF" |
|
"yellow" | "y" | [1 1 0] | "#FFFF00" |
|
"black" | "k" | [0 0 0] | "#000000" |
|
"white" | "w" | [1 1 1] | "#FFFFFF" |
|
Example: Color="Green" sets the color of the actor in driving
scenario to green.
Classification identifier of actor, specified as a nonnegative integer.
The ClassID as 0 is reserved for an object
of an unknown or unassigned class. If you plan to import
drivingScenario objects into the Driving Scenario
Designer app, do not set the ClassID property of actors
to 0. The app does not recognize a ClassID of
0 for actors and returns an error. Instead, set one of these
ClassID values of actors.
ClassID | Class Name |
|---|---|
1 | Car |
2 | Truck |
3 | Bicycle |
4 | Pedestrian |
Mesh representation of the actor, specified as an extendedObjectMesh
object. You can use a mesh created by one of these functions:
driving.scenario.carMesh— Represents mesh of a car in driving scenario.driving.scenario.truckMesh— Represents mesh of a truck in driving scenario.driving.scenario.bicycleMesh— Represents mesh of a bicycle in driving scenario.driving.scenario.pedestrianMesh— Represents mesh of a pedestrian in driving scenario.
You can develop your own mesh by using a prebuilt mesh as a starting point. For example, to edit a car mesh, at the MATLAB® command line, enter:
edit driving.scenario.carMesh
Type of 3-D display asset, specified as a string scalar of valid asset type. You can specify one of these 3-D display assets:
"Cuboid""Sedan""MuscleCar""Hatchback""SportUtilityVehicle""SmallPickupTruck""BoxTruck""Bicyclist""MalePedestrian""FemalePedestrian"
Source of the road network to import road data, specified as a string scalar of valid road network source. You can specify one of these road network sources:
"OpenDrive"— Imports roads from an ASAM OpenDRIVE® road network file. You must specify the road network filename using theFileNamename-value argument."OpenStreetMap"— Imports roads from an OpenStreetMap® road network file. You must specify the road network filename using theFileNamename-value argument."HEREHDLiveMap"— Imports roads from a HERE HD Live Map 1 (HDLM) web service."ZenrinJapanMap"— Imports roads from a Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) 2 web service.Importing roads from the Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) service requires Automated Driving Toolbox Importer for Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) Service.
Name of the road network file, specified as a character vector or string scalar.
FileName must specify a file in the current folder, a file that
is on the MATLAB search path, or a full or relative path to a file.
FileName must end with a file extension that is valid for the
source of the road network.
| Road Network Source | Valid File Extensions | Sample Syntax |
|---|---|---|
| OpenDRIVE® |
|
FileName="C:\Desktop\roads.xodr" |
| OpenStreetMap |
|
FileName="C:\Desktop\map.osm" |
Geographic coordinates to download road network from HERE HD Live Map or Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0), specified as an N-by-2 matrix or a 4-element row vector.
If you specify an N-by-2 matrix, value must be in the form [lat; lon]. N is the number of geographic coordinates. Values of lat must be in the range [–90, 90] and values of lon must be in range [–180, 180]. Units are in degrees.
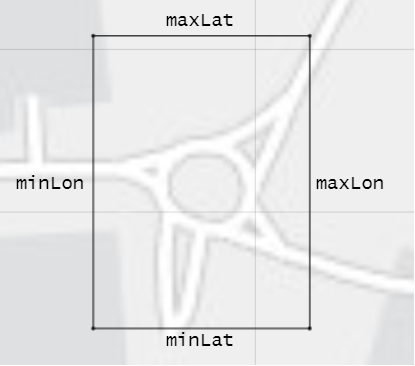
If you specify a 4-element row vector, value must be in the form
[minLat
minLon
maxLat
maxLon] representing a bounding box. The
exportToDrivingScenario function imports any roads that are at
least partially within the specified bounding box. This figure displays the
relationship between these coordinates.
minLat — Minimum latitude coordinate of the bounding box, specified as a scalar in the range [–90, 90].
minLatmust be less thanmaxLat. Units are in degrees.minLon — Minimum longitude coordinate of the bounding box, specified as a scalar in the range [–180, 180].
minLonmust be less thanmaxLon. Units are in degrees.maxLat — Maximum latitude coordinate of the bounding box, specified as a scalar in the range [–90, 90].
maxLatmust be greater thanminLat. Units are in degrees.maxLon — Maximum longitude coordinate of the bounding box, specified as a scalar in the range [–180, 180].
maxLonmust be greater thanminLon. Units are in degrees.
Set up driving scenario simulation status, specified as a logical
1 (true) or 0
(false).
By default, the function updates the simulation stop time and sample time per the
input trajectory trajectory. Use this name-value argument when
you export multiple trajectories to a scenario and you want to set up the driving
scenario simulation parameters for a specific actor trajectory. For example, specify
true for an ego trajectory and specify false
for other actor trajectories.
Data Types: logical
Output Arguments
Version History
Introduced in R2024b
See Also
GPSData | Trajectory | CameraData | LidarData | recordedSensorData
1 You need to enter into a separate agreement with HERE in order to gain access to the HDLM services and to get the required credentials (access_key_id and access_key_secret) for using the HERE Service.
2 To gain access to the Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) service and get the required credentials (a client ID and secret key), you must enter into a separate agreement with ZENRIN DataCom CO., LTD.