ROILabelData
Ground truth data for ROI labels
Description
The ROILabelData object stores ground truth data for region of
interest (ROI) label definitions for each signal in a groundTruthMultisignal object.
Creation
When you export a groundTruthMultisignal object from a Ground
Truth Labeler app session, the ROILabelData property of the
exported object stores the ROI labels as an ROILabelData object. To create an
ROILabelData object programmatically, use the
vision.labeler.labeldata.ROILabelData function (described here).
Description
roiLabelData = vision.labeler.labeldata.ROILabelData(signalNames,labelData)roiLabelData, contains properties with the signal names listed in
signalNames. These properties store the corresponding ROI label
data specified by labelData.
Input Arguments
Signal names, specified as a string array. Specify the names of all signals
present in the groundTruthMultisignal object you are creating. You
can get the signal names from an existing groundTruthMultisignal
object by accessing the DataSource property of that object. Use
this command and replace gTruth with the name of your
groundTruthMultisignal object variable.
gTruth.DataSource.SignalName
In an exported groundTruthMultisignal object, the
ROILabelData object contains a label data property for each signal,
even if some signals do not have ROI label data.
The properties of the created ROILabelData object have the names
specified by signalNames.
Example: ["video_01_city_c2s_fcw_10s"
"lidarSequence"]
ROI label data for each signal, specified as a cell array of timetables. Each
timetable in the cell array contains data for the signal in the corresponding position
of the signalNames input. The ROILabelData
object stores each timetable in a property that has the same name as that
signal.
The timetable format for each signal depends on data from the
groundTruthMultisignal object that you exported or are
creating.
Each timetable contains one column per label definition stored in the
LabelDefinitions property of the
groundTruthMultisignal object. Label definitions that the signal
type does not support are excluded. For example, suppose you define a
Line ROI label named 'lane'. The timetable for
a lidar point cloud signal does not include a lane column, because
these signals do not support Line ROI labels. In the
DataSource property of the
groundTruthMultisignal object, the SignalType
property of each data source lists the valid signal types.
The height of the timetable is defined by the number of timestamps in the signal.
In the DataSource property of the
groundTruthMultisignal object, the Timestamp
property of each data source lists the signal timestamps.
For each label definition, all ROI labels marked at that timestamps are combined
into a single cell in the table. Consider the ROI label data for a video signal stored
in a groundTruthMultisignal object, gTruth. At
each timestamp, car contains three labels, truck
contains one label, and lane contains two labels.
gTruth.ROILabelData.video_01_city_c2s_fcw_10s
ans =
5×4 timetable
Time car truck lane
_________ ____________ ____________ ____________
0 sec {3×4 double} {1×4 double} {2×1 cell }
0.05 sec {3×4 double} {1×4 double} {2×1 cell }
0.1 sec {3×4 double} {1×4 double} {2×1 cell }
0.15 sec {3×4 double} {1×4 double} {2×1 cell }
0.2 sec {3×4 double} {1×4 double} {2×1 cell }The storage format for ROI label data depends on the label type.
| Label Type | Storage Format for Labels at Each Timestamp |
|---|---|
labelType.Rectangle |
|
labelType.RotatedRectangle |
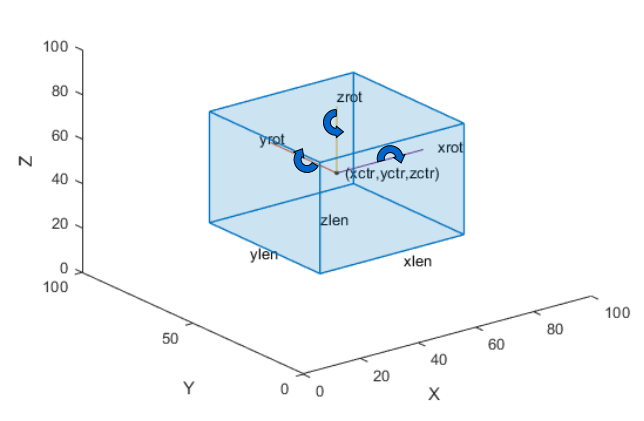
For one or more rotated rectangles, specify in spatial coordinates as an M-by-5 numeric matrix, where each row specifies a rotated rectangle of the form [xctr yctr w h yaw].
|
|
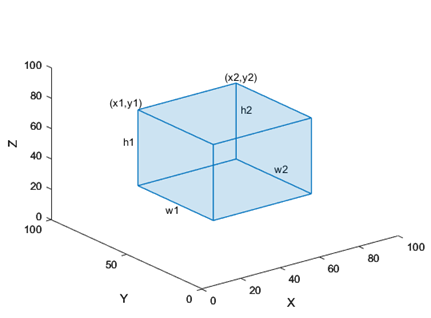
The figure shows how these values determine the position of a cuboid.
|
|
The figure shows how these values determine the position of a cuboid.
|
labelType.Line |
|
labelType.PixelLabel | Label data for all pixel label definitions is stored in a
single M-by-1 |
labelType.Polygon |
|
labelType.Custom | Labels are stored exactly as they are specified in the timetable.
If you import a |
If the ROI label data includes sublabels or attributes, then the labels at each timestamp must be specified as structures instead. The structure includes these fields.
| Label Structure Field | Description | ||||||
|---|---|---|---|---|---|---|---|
Position | Positions of the parent labels at the given timestamp The format of | ||||||
AttributeName1,...,AttributeNameN | Attributes of the parent labels Each defined sublabel
has its own field, where the name of the field corresponds to the
attribute name. The attribute value is a character vector for a
| ||||||
SublabelName1,...,SublabelNameN | Sublabels of the parent labels Each defined sublabel has its own field, where the name of the field corresponds to the sublabel name. The value of each sublabel field is a structure containing the data for all marked sublabels with that name at the given timestamp. This table describes the format of this sublabel structure.
|
Properties
Examples
Version History
Introduced in R2020a