Ground Truth Labeler
Label ground truth data for automated driving applications
Description
The Ground Truth Labeler app enables you to label ground truth data in multiple videos, image sequences, or lidar point clouds.
Using the app, you can:
Simultaneously label multiple time-overlapped signals representing the same scene.
Define an axis-aligned or rotated rectangular region of interest (ROI) labels, polyline ROI labels, pixel ROI labels, cuboid ROI labels for lidar labeling, and scene label definitions. Use these labels to interactively label your ground truth data.
Use the Projected View option to view the labels in top, front and side views simultaneously.
Use the XY View, YZ View, and XZ View options to get the top view, front view, and side view of a point cloud scene, respectively.
Use built-in detection or tracking algorithms to label ground truth data.
Write, import, and use custom automation algorithms to automatically label ground truth data.
Evaluate the performance of your label automation algorithms by using a visual summary.
Export the ground truth labels as a
groundTruthMultisignalobject. You can use this object for system verification or for training an object detector or semantic segmentation network.Display time-synchronized signals, such as CAN bus data, by using the
driving.connector.ConnectorAPI.
To learn more about this app, see Get Started with Ground Truth Labeling.

Open the Ground Truth Labeler App
MATLAB® Toolstrip: On the Apps tab, under Automotive, click the app icon.
MATLAB command prompt: Enter
groundTruthLabeler.
Examples
- Get Started with Ground Truth Labeling
- Automate Ground Truth Labeling Across Multiple Signals
- Automate Ground Truth Labeling of Lane Boundaries
- Automate Ground Truth Labeling for Semantic Segmentation
- Automate Attributes of Labeled Objects
- Evaluate Lane Boundary Detections Against Ground Truth Data
- Evaluate and Visualize Lane Boundary Detections Against Ground Truth
Programmatic Use
Limitations
Lidar signals do not support line or pixel ROI labels.
Pixel ROI labels do not support sublabels or attributes.
Cuboid ROI labels do not support sublabels.
The Label Summary window does not support sublabels or attributes
Importing
groundTruthobject created from Image Labeler app is not supported.
More About
On the left side of the app, the ROI Label Definitions pane
contains the region of interest (ROI) label definitions that you can mark on the
frames. You can create label definitions using the Add Label
option from the app toolstrip. Alternatively, you can create label definitions
programmatically by using a labelDefinitionCreatorMultisignal object and then import these label
definitions into an app session.
The app supports the definition of ROI labels, sublabels, and attributes.
An ROI label is a label that corresponds to a region of interest (ROI) in a signal frame. The table describes the supported label types.
| ROI Label | Description | Scene |
|---|---|---|
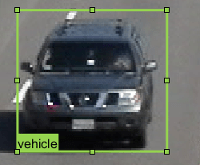
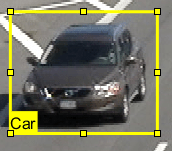
Rectangle/Cuboid | Draw rectangular or cuboidal ROI labels around objects, depending on the signal type.
| Vehicles, pedestrians, road signs
|
| ||
Rotated Rectangle | Draw rotated rectangular ROI labels around object. |
: |
Point | Draw point labels in an image signal to identify objects. |
|
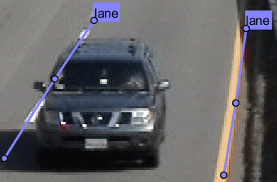
Line | Draw linear ROI labels to represent lines. To draw a polyline ROI, use two or more points. | Lane boundaries, guard rails, road curbs
|
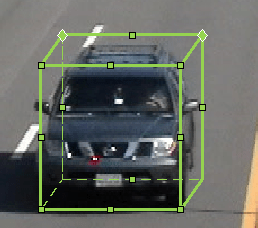
Projected Cuboid | Draw cuboidal ROI labels (3-D bounding boxes). |
|
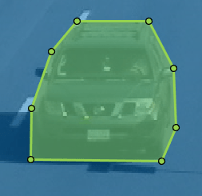
Polygon | Draw polygon ROI labels. You can label distinct instances of the same class. For more information on drawing polygon ROI labels for instance and semantic segmentation networks, see Label Objects Using Polygons for Instance Segmentation | Vehicles, road surface, trees, pavement
|
Pixel | Assign labels to pixels for semantic segmentation. You can label pixels manually using polygons, brushes, or flood fill. For more on pixel labeling, see Label Pixels for Semantic Segmentation. | Vehicles, road surface, trees, pavement
|



An ROI sublabel is an ROI label that belongs to a parent label. Use ROI sublabels to provide a greater level of detail about the ROIs in your labeled ground truth data. For example, a vehicle label might contain headlight, licensePlate, and wheel sublabels. You can create sublabels only for axis aligned and rotated rectangular and polyline labels. For more details about sublabels, see Use Sublabels and Attributes to Label Ground Truth Data.
You can show or hide the labels or sublabels in a labeled ground truth data
by using the ![]() icon on the ROI Label
Definitions pane. The
icon on the ROI Label
Definitions pane. The ![]() appears only after you define a label or
sublabel. By default, the app displays all the labels and the sublabels.
appears only after you define a label or
sublabel. By default, the app displays all the labels and the sublabels.
To hide a label or sublabel, click on the ![]() icon along side the label or sublabel name.
The app hides the corresponding label or sublabel and displays the
icon along side the label or sublabel name.
The app hides the corresponding label or sublabel and displays the ![]() icon.
icon.
|
|
|


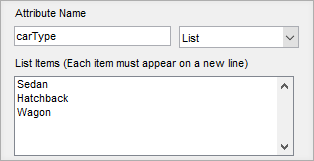
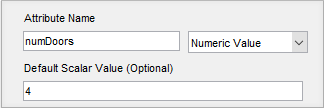
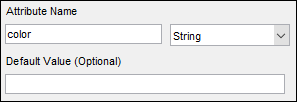
An ROI attribute specifies additional information about an ROI label or sublabel. For example, in a driving scene, attributes might include the type or color of a vehicle. The table describes the supported attribute types.
| Attribute Type | Sample Attribute Definition | Sample Default Values |
|---|---|---|
|
|
|
|
| |
|
| |
|
|

For more details about attributes, see Use Sublabels and Attributes to Label Ground Truth Data.
Tips
To avoid having to relabel ground truth with new labels, organize the labeling scheme you want to use before marking your ground truth.
You can copy and paste labels between signals that are of the same type.
Algorithms
Version History
Introduced in R2017aSee Also
Apps
Objects
Classes
vision.labeler.loading.MultiSignalSource|vision.labeler.AutomationAlgorithm|vision.labeler.mixin.Temporal|driving.connector.Connector
Topics
- Choose an App to Label Ground Truth Data
- Keyboard Shortcuts and Mouse Actions for Ground Truth Labeler
- Label Pixels for Semantic Segmentation
- Label Lidar Point Clouds for Object Detection
- Create Class for Loading Custom Ground Truth Data Sources
- Create Custom Automation Algorithm for Labeling
- Share and Store Labeled Ground Truth Data