dsp.HighpassFilter
FIR or IIR highpass filter
Description
The dsp.HighpassFilter
System object™ independently filters each channel of the input over time using the given design
specifications. You can set the FilterType property of
dsp.HighpassFilter to 'FIR' or 'IIR'
to implement the object as an FIR or IIR highpass filter.
When the FilterType property is set to 'FIR',
using this object is an alternative to using the firceqrip and
firgr functions with dsp.FIRFilter. The
dsp.HighpassFilter object condenses the two-step process into one. You can
use measure to verify that the design meets the prescribed specifications.
To filter each channel of your input:
Create the
dsp.HighpassFilterobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
This object supports C/C++ code generation and SIMD code generation under certain conditions. This object also supports code generation for ARM® Cortex®-M and ARM Cortex-A processors. For more information, see Code Generation.
Creation
Description
HPF = dsp.HighpassFilterHPF, with the default filter settings.
Calling the object with the default property settings filters the input data with a
stopband frequency of 8 kHz, a passband frequency of
12 kHz, a stopband attenuation of 80 dB, and a
passband ripple of 0.1 dB.
HPF = dsp.HighpassFilter(PropertyName=Value)Name-Value pair arguments. Name is the
property name and Value is the corresponding value. For example,
StopbandFrequency=8000 sets the stopband frequency specification of
the filter to 8000 Hz.
Properties
Usage
Syntax
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Create a minimum order FIR highpass filter for data sampled at 44.1 kHz. Specify a passband frequency of 12 kHz, a stopband frequency of 8 kHz, a passband ripple of 0.1 dB, and a stopband attenuation of 80 dB.
Fs = 44.1e3; filtertype = 'FIR'; Fpass = 12e3; Fstop = 8e3; Rp = 0.1; Astop = 80; FIRHPF = dsp.HighpassFilter(SampleRate=Fs,... FilterType=filtertype,... PassbandFrequency=Fpass,... StopbandFrequency=Fstop,... PassbandRipple=Rp,... StopbandAttenuation=Astop);
Design a minimum order IIR highpass filter with the same properties as the FIR highpass filter. Use clone to create a system object with the same properties as the FIR Highpass filter. Change the FilterType property of the cloned filter to IIR.
IIRHPF = clone(FIRHPF);
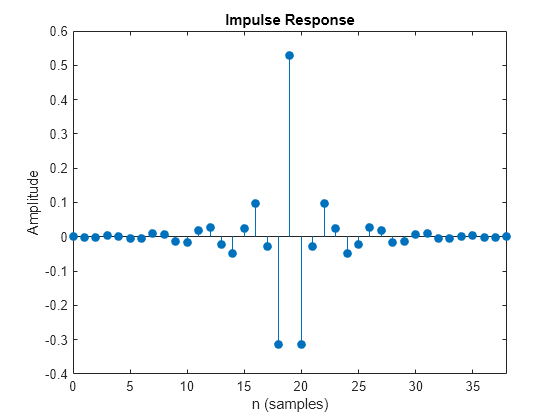
IIRHPF.FilterType = 'IIR';Plot the impulse response of the FIR highpass filter. The zeroth order coefficient is delayed by 19 samples, which is equal to the group delay of the filter. The FIR highpass filter is a causal FIR filter
impz(FIRHPF)
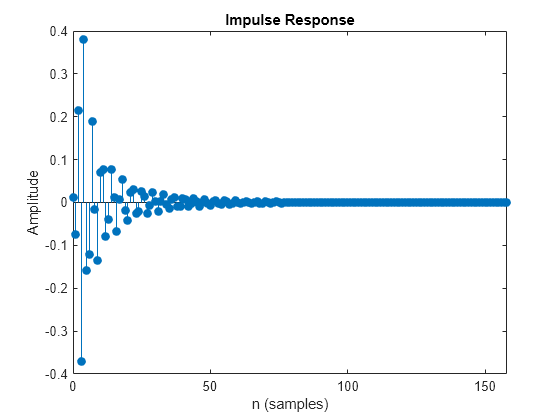
Plot the impulse response of the IIR highpass filter.
impz(IIRHPF)
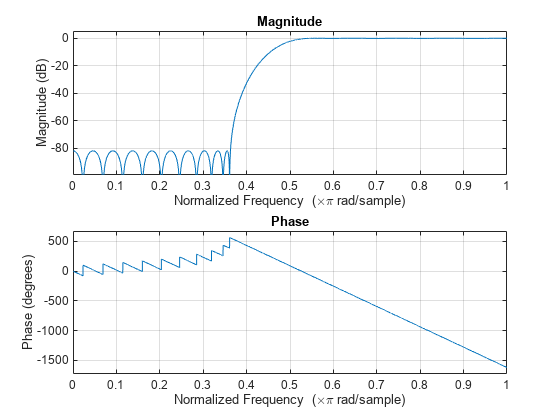
Plot the magnitude and phase response of the FIR highpass filter.
freqz(FIRHPF)
Plot the magnitude and phase response of the IIR highpass filter.
freqz(IIRHPF)

Calculate the cost of implementing the FIR highpass filter.
cost(FIRHPF)
ans = struct with fields:
NumCoefficients: 39
NumStates: 38
MultiplicationsPerInputSample: 39
AdditionsPerInputSample: 38
Calculate the cost of implementing the IIR highpass filter. The IIR filter is more efficient to implement than its FIR counterpart.
cost(IIRHPF)
ans = struct with fields:
NumCoefficients: 18
NumStates: 14
MultiplicationsPerInputSample: 18
AdditionsPerInputSample: 14
Calculate the group delay of the FIR highpass filter.
grpdelay(FIRHPF)
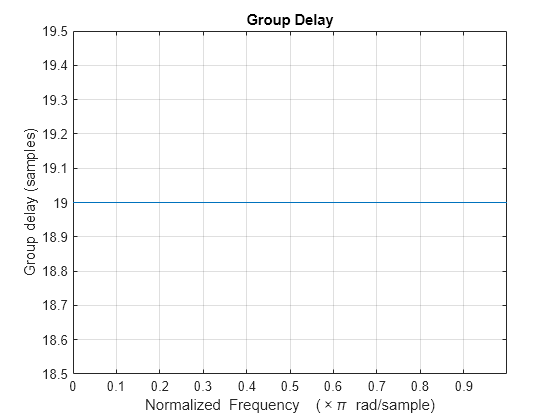
Calculate the group delay of the IIR highpass filter. The FIR filter has a constant group delay (linear phase) while its IIR counterpart does not.
grpdelay(IIRHPF)

Create a highpass filter using the dsp.HighpassFilter object. Setting the NormalizedFrequency property to true designs the filter with frequency specifications in normalized frequency units.
LPF = dsp.HighpassFilter(NormalizedFrequency=true)
LPF =
dsp.HighpassFilter with properties:
FilterType: 'FIR'
DesignForMinimumOrder: true
StopbandFrequency: 0.3628
PassbandFrequency: 0.5442
StopbandAttenuation: 80
PassbandRipple: 0.1000
NormalizedFrequency: true
Show all properties
Create a spectrumAnalyzer object to visualize the input and output signal spectra. With a sample rate of 44.1e3 Hz, the stopband frequency and the passband frequency of the filter translate to 8000 Hz and 12000 Hz, respectively.
SA = spectrumAnalyzer(SampleRate=44.1e3,... PlotAsTwoSidedSpectrum=false,ShowLegend=true,... YLimits=[-150 30],... Title='Input Signal and Output Signal of Lowpass Filter'); SA.ChannelNames = {'Input','Output'};
Run the highpass filter algorithm to filter the white Gaussian noisy input signal. View the input and output signals using the spectrum analyzer.
for k = 1:100 Input = randn(1024,1); Output = LPF(Input); SA([Input,Output]); end

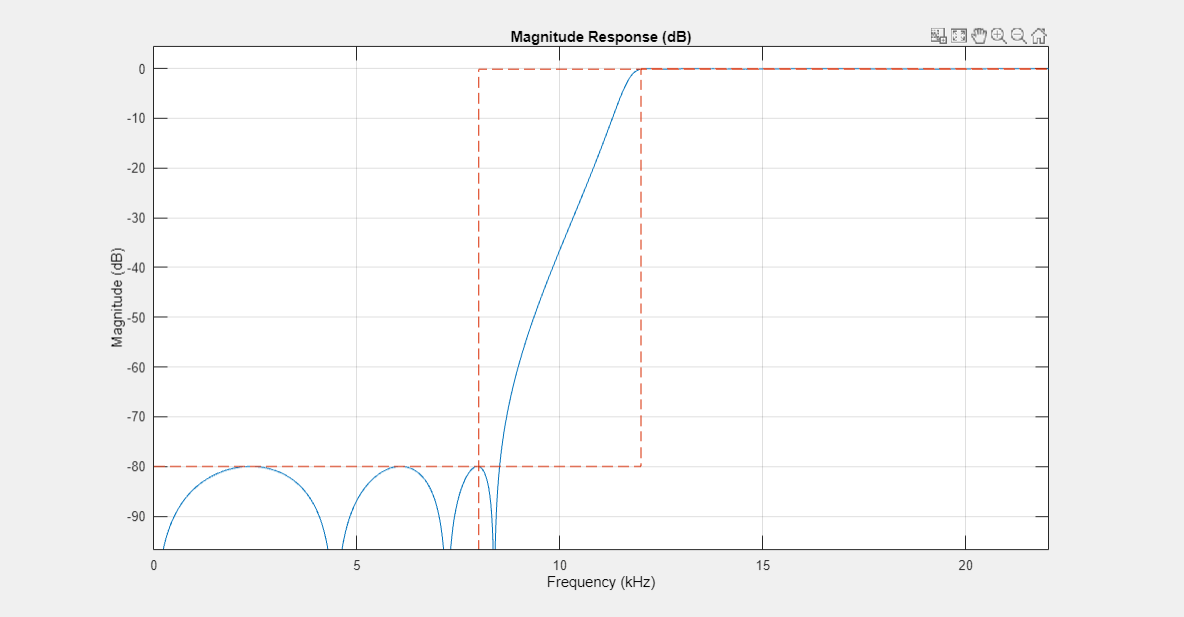
Set up the IIR highpass filter. The sampling rate of the white Gaussian noise is 44,100 Hz. The passband frequency of the filter is 12 kHz, the stopband frequency is 8 kHz, the passband ripple is 0.1 dB, and the stopband attenuation is 80 dB.
Fs = 44.1e3; filtertype = 'IIR'; Fpass = 12e3; Fstop = 8e3; Rp = 0.1; Astop = 80; hpf = dsp.HighpassFilter(SampleRate=Fs,... FilterType=filtertype,... PassbandFrequency=Fpass,... StopbandFrequency=Fstop,... PassbandRipple=Rp,... StopbandAttenuation=Astop);
View the magnitude response of the highpass filter.
filterAnalyzer(hpf)
Create a spectrum analyzer object.
sa = spectrumAnalyzer(SampleRate=44.1e3,... PlotAsTwoSidedSpectrum=false,ShowLegend=true,... YLimits=[-150 30],... Title='Input Signal and Output Signal of IIR Highpass Filter'); sa.ChannelNames = {'Input','Output'};
Filter the white Gaussian noisy input signal. View the input and output signals using the spectrum analyzer.
for k = 1:100 Input = randn(1024,1); Output = hpf(Input); sa([Input,Output]); end

Measure the frequency response characteristics of a highpass filter. Create a dsp.HighpassFilter System object with default properties. Measure the frequency response characteristics of the filter.
HPF = dsp.HighpassFilter
HPF =
dsp.HighpassFilter with properties:
FilterType: 'FIR'
DesignForMinimumOrder: true
StopbandFrequency: 8000
PassbandFrequency: 12000
StopbandAttenuation: 80
PassbandRipple: 0.1000
NormalizedFrequency: false
SampleRate: 44100
Show all properties
HPFMeas = measure(HPF)
HPFMeas = Sample Rate : 44.1 kHz Stopband Edge : 8 kHz 6-dB Point : 10.3225 kHz 3-dB Point : 10.7499 kHz Passband Edge : 12 kHz Stopband Atten. : 80 dB Passband Ripple : 0.1 dB Transition Width : 4 kHz
More About
Algorithms
References
[1] Shpak, D.J., and A. Antoniou. "A generalized Remez method for the design of FIR digital filters." IEEE® Transactions on Circuits and Systems. Vol. 37, Issue 2, Feb. 1990, pp. 161–174.
[2] Selesnick, I.W., and C. S. Burrus. "Exchange algorithms that complement the Parks-McClellan algorithm for linear-phase FIR filter design." IEEE Transactions on Circuits and Systems. Vol. 44, Issue 2, Feb. 1997, pp. 137–143.
Extended Capabilities
Version History
Introduced in R2015aSee Also
Functions
freqz|filterAnalyzer|impz|info|coeffs|cost|grpdelay|outputDelay|measure|firceqrip|firgr|setInputSampleRate