Fourth-Order Section Filter
Libraries:
DSP System Toolbox /
Filtering /
Filter Implementations
Description
The Fourth-Order Section Filter block implements a cascade of fourth-order section filters in Simulink®. You can specify the numerator and denominator coefficients of the filter in the block parameters dialog box or through input ports.
Examples
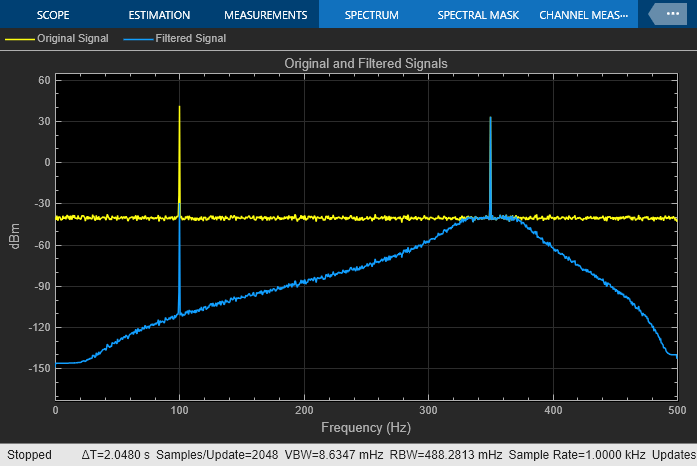
Filter Noisy Signal Using Fourth-Order Section (FOS) Filter in Simulink
Filter noisy sinusoidal signal using fourth order section filter in Simulink.
Ports
Input
Input signal, specified as a vector or a matrix. The input can be a variable size signal. That is, the frame size of the signal can change during simulation but the number of channels cannot.
This port is unnamed until you set the Coefficient source
parameter to Input ports.
Data Types: single | double
Complex Number Support: Yes
Specify the numerator coefficients of the fourth-order section filter as a P-by-5 matrix, where P is the number of filter sections. For more details on this input port, see Numerator coefficients of filter.
While the simulation is running, you can change the number of sections (rows) in the numerator coefficients. You can also change the coefficient values.
Dependencies
This port appears only when you set the Coefficient source
parameter to Input ports.
Data Types: single | double
Complex Number Support: Yes
Specify the denominator coefficients of the fourth-order section filter as a P-by-5 matrix or a P-by-4 matrix, where P is the number of filter sections. For more details on this input port, see Denominator coefficients of filter.
While the simulation is running, you can change the number of sections (rows) in the denominator coefficients. You can also change the coefficient values.
Dependencies
This port appears only when you set the Coefficient source
parameter to Input ports.
Data Types: single | double
Complex Number Support: Yes
Output
Filtered output, returned as a vector or a matrix. The output has the same size and data type as the input. The output signal is complex if either the input signal, numerator coefficients, or the denominator coefficients are complex.
This port is unnamed until you set the Coefficient source
parameter to Input ports.
Data Types: single | double
Complex Number Support: Yes
Parameters
Specify the filter coefficient source as one of the following:
Dialog parameters— Specify the filter coefficients through the Numerator coefficients of filter and the Denominator coefficients of filter parameters in the block dialog box.Input ports— Specify the filter coefficients through the Num and Den input ports.Filter object— Specify the filter coefficients using adsp.FourthOrderSectionFilterobject.
To view the filter response, set this parameter to Dialog
parameters or Filter object, and then click
the View Filter Response button.
Specify the numerator coefficients b of the fourth-order section filter as a P-by-5 matrix, where P is the number of filter sections.
In the transfer function form, the fourth-order section filter can be represented using the following equation:
where,
a — Denominator coefficients matrix. For more details on how to specify this matrix, see Denominator coefficients of filter.
k — Row index.
You cannot change the size of this parameter during simulation, but you can change its value.
Dependencies
To enable this parameter, set Coefficient source to
Dialog parameters.
Tunable: Yes
Data Types: single | double
Complex Number Support: Yes
Specify the denominator coefficients a of the fourth-order section filter as a P-by-5 matrix or a P-by-4 matrix, where P is the number of filter sections.
The block algorithm assumes that the value of the leading coefficients is always 1. If the denominator is of size P-by-4, the block algorithm places 1s in the first column to make the denominator size P-by-5. If the denominator is of size P-by-5 and the elements in the first column do not equal 1, the algorithm ignores the values in the first column and appends them with 1s.
In the transfer function form, the fourth-order section filter can be represented using the following equation:
where,
b — Numerator coefficients matrix. For more details on how to specify this matrix, see Numerator coefficients of filter.
k — Row index.
You cannot change the size of this parameter during simulation, but you can change its value.
Dependencies
To enable this parameter, set Coefficient source to
Dialog parameters.
Tunable: Yes
Data Types: single | double
Complex Number Support: Yes
Specify the filter coefficients using a dsp.FourthOrderSectionFilter object. You can enter this object directly in
the Filter parameter. Alternatively, you can create this object in
the MATLAB® workspace or model workspace and specify the filter variable in the
Filter parameter. When you specify the filter as a variable and
you simulate the model, you cannot change the complexity, data type, and size of the
filter coefficients in the workspace between simulations.
Dependencies
To enable this parameter, set Coefficient source to
Filter object.
Clicking this button opens the filter visualizer and displays the magnitude response
of the fourth-order section filter. The response is based on the coefficients that you
specify in the block dialog box. If you set Coefficient source to
Input ports and click Apply, you
cannot view the magnitude response using this button.
To update the filter response while the visualizer is running, modify the coefficients in the block dialog box and click Apply.
You can configure the plot settings and the frequency response measurements from the interface of the visualizer.
On the Scope tab, you can enable the legend, specify to plot both magnitude and phase responses of the filter, modify the plot settings, generate a script to re-create the plot, and even save or share the settings. On the Measurements tab, you can enable data cursors, and display the peak values of the filter response.
For more details on the filter visualizer interface and its tools, see Configure Filter Visualizer.
Dependencies
To enable this button, you must specify the filter coefficients directly in the
block dialog box or through the dsp.FourthOrderSectionFilter
object.
Specify the type of simulation to run. You can set this parameter to:
Interpreted execution— Simulate model using the MATLAB interpreter. This option shortens startup time.Code generation— Simulate model using generated C code. The first time you run a simulation, Simulink generates C code for the block. The C code is reused for subsequent simulations as long as the model does not change. This option requires additional startup time but provides faster subsequent simulations.
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
Version History
Introduced in R2022aStarting in R2022b, when you pass numerator and denominator coefficients through the input ports of the Fourth-Order Section Filter block, you can change the number of sections (rows) in the filter coefficients while the simulation is running.
You can also specify the coefficients in the block dialog box using a dsp.FourthOrderSectionFilter object. Set Coefficient source
to Filter object and specify a
dsp.FourthOrderSectionFilter object directly in the
Filter parameter. Alternatively, you can create this object in the
MATLAB workspace or model workspace and specify the filter variable in the
Filter parameter.
See Also
Objects
Blocks
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
选择网站
选择网站以获取翻译的可用内容,以及查看当地活动和优惠。根据您的位置,我们建议您选择:。
您也可以从以下列表中选择网站:
如何获得最佳网站性能
选择中国网站(中文或英文)以获得最佳网站性能。其他 MathWorks 国家/地区网站并未针对您所在位置的访问进行优化。
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)