dsphdl.CICInterpolator
Description
The dsphdl.CICInterpolator
System object™ interpolates an input signal by using a cascaded integrator-comb (CIC)
interpolation filter. CIC interpolation filters are a class of linear phase finite impulse
response (FIR) filters consisting of a comb part and an integrator part. The CIC interpolation
filter structure consists of N sections of cascaded comb filters, a rate
change factor of R, and N sections of cascaded
integrators. For more information about CIC interpolation filters, see Algorithms.
The System object supports these combinations of input and output data.
Scalar input and scalar output — Support for fixed and variable interpolation rates
Scalar input and vector output — Support for fixed interpolation rates only
Vector input and vector output — Support for fixed interpolation rates only
The System object provides an architecture suitable for HDL code generation and hardware deployment.
The System object supports real and complex fixed-point inputs.
To filter input data with a CIC interpolator filter, follow these steps:
Create the
dsphdl.CICInterpolatorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Note
You can also generate HDL code for this hardware-optimized algorithm, without creating a MATLAB® script, by using the DSP HDL IP Designer app. The app provides the same interface and configuration options as the System object.
Creation
Description
cicIntFilt = dsphdl.CICInterpolatorcicIntFilt, with default properties.
cicIntFilt = dsphdl.CICInterpolator(PropertyName=Value)
Properties
Usage
Syntax
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Algorithms
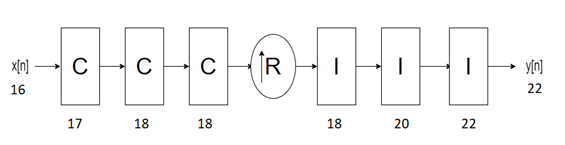
The dsphdl.CICInterpolator
System object has the CIC filter structure shown in this figure. The structure consists of
N sections of cascaded comb filters, a rate change factor of
R, and N sections of cascaded integrators [1].

You can locate the unit delay in the integrator part of the CIC filter in either the feedforward or feedback path. These two configurations yield an identical filter frequency response. However, the numerical outputs from these two configurations are different due to the latency of the paths. Because this configuration is preferred for HDL implementation, this System object puts the unit delay in the feedforward path of the integrator.
This section explains how the System object outputs data is based on the output data type selection. Consider a System object with R, M, and N values of 8, 1, and 3, respectively, and an input width of 16. The word length at the ith stage is calculated as , where:
Gi is the gain at ith stage.
BIn is the input word length.
Bi is the word length at ith stage.
The output word length is calculated as , where BOut is the output word length.
When you set the OutputDataType property to 'Full
precision', the System object returns data with a word length of 22 by adding 6 gain bits to the input word
length of 16. The word lengths of the internal comb and integrator stages are set to
accommodate the bit growth.
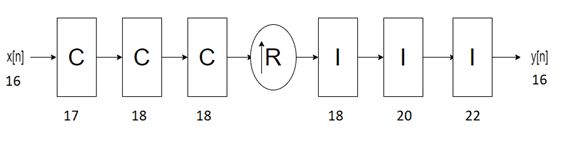
When you set the OutputDataType property to 'Same word
length as input', the object outputs data with a word length of 16, which is the
same length as the input word length. The word lengths of the internal comb and integrator
stages are set in the same way as in 'Full precision' mode.
When you set the OutputDataType property to 'Minimum
section word lengths' and the OutputWordLength to
16, the System object returns data with a word length of 16. The word lengths of the internal comb
and integrator stages are set in the same way as in 'Full precision'
mode.
The latency of the System object changes depending on the type of input, the interpolation you specify, the
value of the NumSections property, GainCorrection
property, and the NumCycles property. This table shows the latency of
the System object. N is the number of sections, vecLen is
the length of the vector, and R is the interpolation factor.
Common latency is equal to 2 + (N x (vecLen x R)) + 3 x N, when R is equal to 1 and it is equal to 3 + (N x (vecLen x R)) + 3 x N, when R is greater than 1.
| Input Data | Output Data | Interpolation Type | Gain Correction | Minimum number of cycles between valid input samples (NumCycles) | Latency in Clock Cycles |
|---|---|---|---|---|---|
| Scalar | Scalar | Fixed | off | NumCycles = R and > R | 3 + N. 2 + N, when R = 1. |
on | NumCycles = R and > R | 3 + N + 9. 2 + N + 9, when R = 1. | |||
| Scalar | Scalar | Variable | off | NA | 3 + N + 2 x Rmax. 2 + N, when Rmax = 1. |
on | NA | 2 + N + 2 x Rmax + 9. 2 + N + 9, when Rmax = 1. | |||
| Scalar | Vector | Fixed | off | NumCycles = 1 | Common latency + 1, when R is greater than N. Common latency, when R is less than or equal to N. Common latency – (1 + floor(N/(3 x R))), when R is less than N and (vecLen == 2 && (R == 2 && (N == 4 || N == 5 || N == 6)) || (R== 3 && N == 6)). |
| NumCycles < R | 3 + N + ((R + 1) x N + 2) + 1 + (N – 1) x NumCycles. | ||||
on | NumCycles = 1 | Common latency + 1 + 9, when R is greater than N. Common latency + 9, when R is less than or equal to N. Common latency – (1 + floor(N/(3 x R))) + 9, when R is less than N and (vecLen == 2 && (R == 2 && (N == 4 || N == 5 || N == 6)) || (R == 3 && N == 6)). | |||
| NumCycles < R | 3 + N + ((R + 1) x N + 2) + 1 + (N – 1) x NumCycles + 9. | ||||
| Vector | Vector | Fixed | off | NumCycles = 1 | Common latency Common latency – 1, when (vecLen == 2 && (R == 2 && (N == 4 || N == 5 || N == 6)) || (R== 3 && N == 6)) || (vecLen == 3 && (R == 2 && N == 6)). Common latency – ((N >1) + (N > 4)), when R = 1 and vecLen == 2. Common latency – ((N > (vecLen – 1)), when R = 1 and vecLen > 2. |
on | NumCycles = 1 | Common latency + 9. Common latency – 1 + 9, when (vecLen == 2 && (R == 2 && (N == 4 || N == 5 || N == 6)) || (R== 3 && N == 6)) || (vecLen == 3 && (R == 2 && N == 6)). Common latency – ((N >1) + (N > 4)) + 9, when R = 1 and vecLen == 2. Common latency – ((N > (vecLen – 1)) + 9, when R = 1 and vecLen > 2. |
Note
The System object does not support variable interpolation for these two combinations of input and output:
Scalar input and vector output
Vector input and vector output
This section shows the output of the System object for a scalar input with different R, M, and N values.
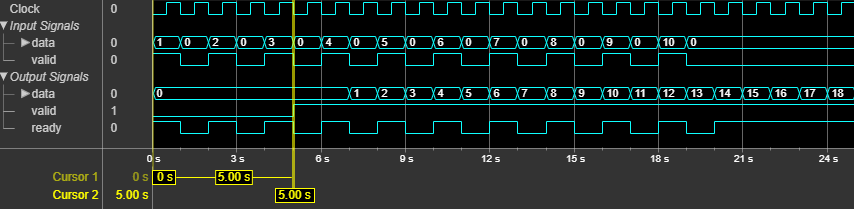
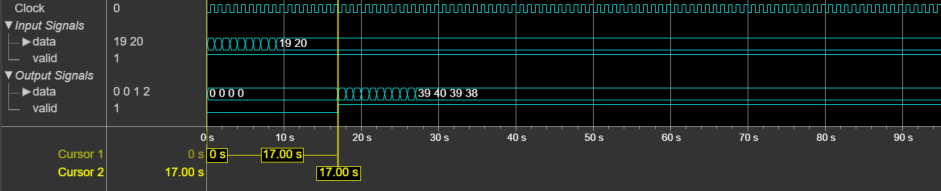
This figure shows the output of the System object with the default configuration (that is, with a fixed interpolation rate and R, M, and N values of 2, 1, and 2, respectively). The latency of the System object is 5 clock cycles and is calculated as 3 + N, where N is the number of sections.
This figure shows the output of the System object with a fixed interpolation rate, R, M,
and N values of 8, 1, and 3, respectively, and
GainCorrection set to true. The latency of the
object is 15 clock cycles and is calculated as 3 + N + 9, where
N is the number of sections.

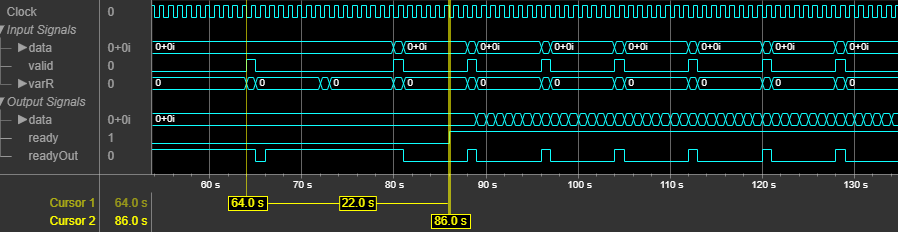
This figure shows the output of the System object with variable interpolation rate (R input argument)
values of 2, 4, and 8 and with M and N values of 1
and 3, respectively. In this case, the GainCorrection property is set
to false. The System object accepts R argument value changes only when
validIn is 1 (true). The
latency of the System object is 22 clock cycles and is calculated as 3 + N + 2 x
Rmax, where N is the
number of sections and Rmax is the maximum
interpolation factor.
This section shows the output of the System object for a vector input with different R, M, and N values.
This figure shows the output of the System object for a two-element column vector input with the default configuration, that is, with a fixed interpolation rate and R, M, and N values of 2, 1, and 2, respectively. The latency of the System object is 38 clock cycles.
This figure shows the output of the System object for an eight-element column vector input with a fixed interpolation rate,
R, M, and N values of 8, 1, and
3, respectively, and the GainCorrection property to
true. The latency of the System object is 209 clock cycles.

References
[1] Hogenauer, E. “An Economical Class of Digital Filters for Decimation and Interpolation.” IEEE Transactions on Acoustics, Speech, and Signal Processing 29, no. 2 (April 1981): 155–62. https://doi.org/10.1109/TASSP.1981.1163535.
Extended Capabilities
Version History
Introduced in R2022a