本页面提供的是上一版软件的文档。当前版本中已删除对应的英文页面。
电机控制
使用 PMSM 编译和部署电机控制应用
使用 PMSM(永磁同步电机制)为基于传感器和无传感器位置应用实现开环或闭环 FOC(磁场定向控制)方法。
该支持包包括参考示例,可帮助您在 STM32 硬件板上编译和部署电机控制应用(使用 Motor Control Blockset™ 和 Embedded Coder®)。
精选示例
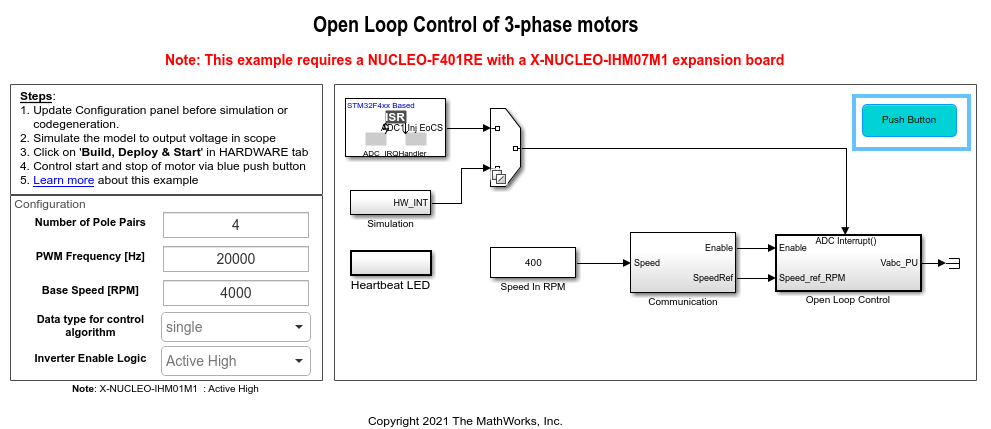
使用基于 STM32 处理器的板对三相 AC 电机进行开环控制
此示例使用开环控制(也称为标量控制或伏特/赫兹控制)来运行电机。这种方法会改变定子电压和频率来控制转子转速,而不使用来自电机的任何反馈。您可以使用这种方法来检查硬件连接的完整性。开环控制的恒速应用使用固定频率的电机电源。开环控制的可调速应用需要可变频率电源来控制转子转速。为了确保恒定的定子磁通,请保持电源电压振幅与其频率成比例。
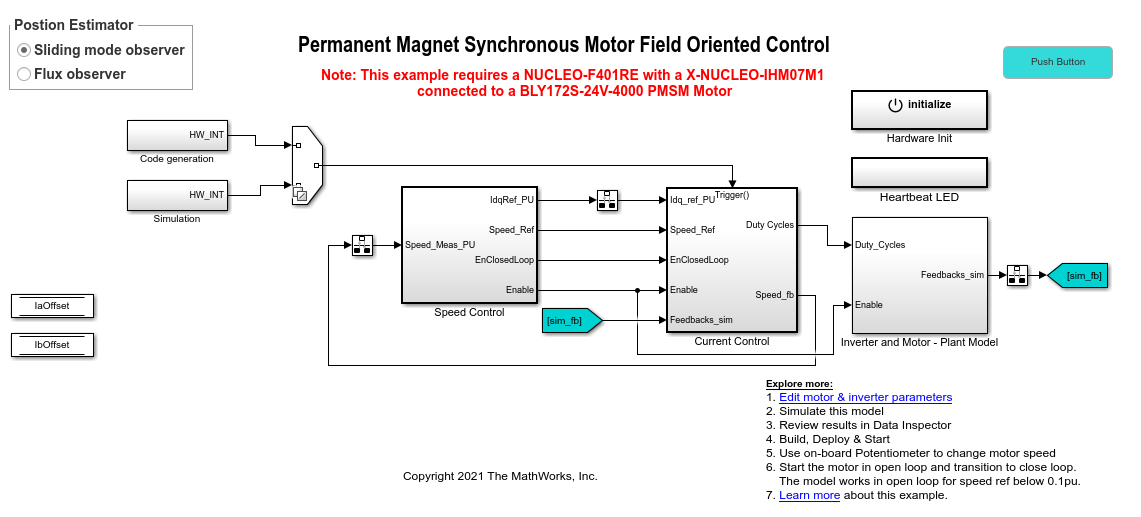
使用基于 STM32 处理器的板实现 PMSM 的无传感器磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转速。有关 FOC 的详细信息,请参阅磁场定向控制 (FOC) (Motor Control Blockset)。
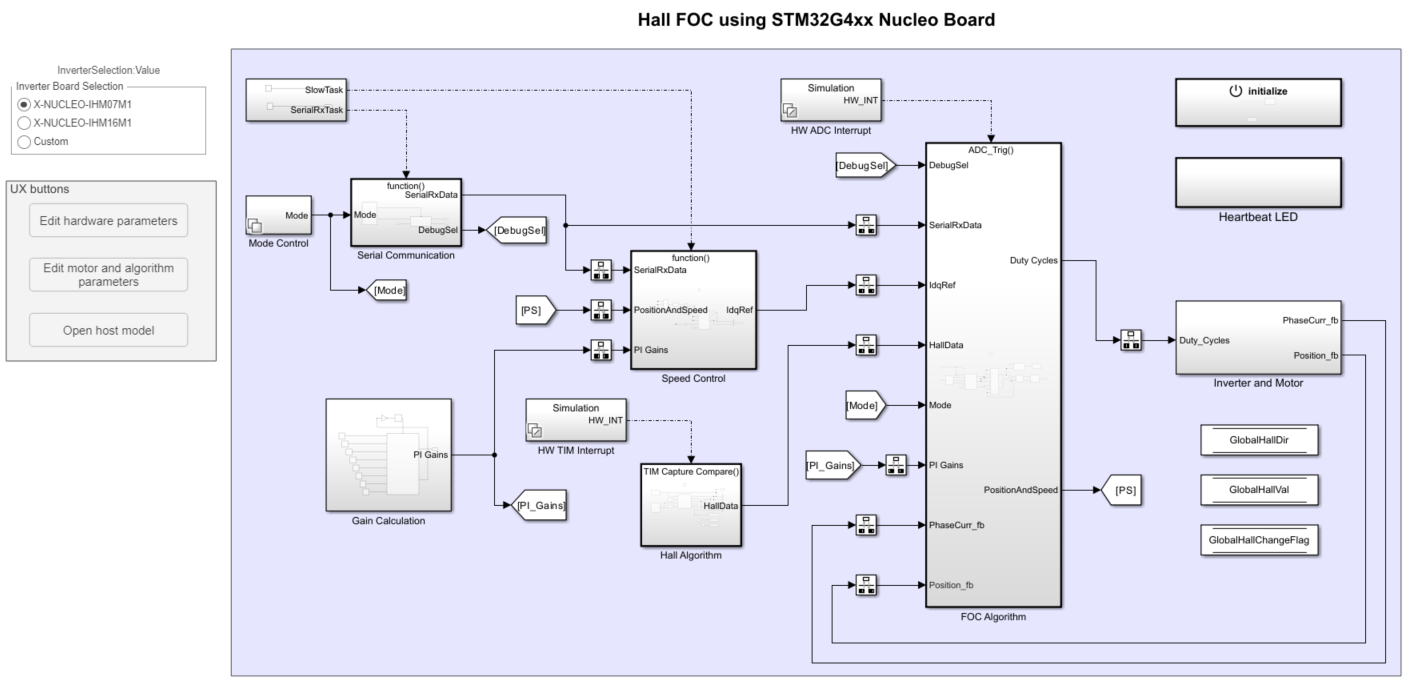
使用基于 STM32G4xx 的处理器和霍尔传感器对 PMSM 进行磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转速。FOC 算法需要转子位置反馈,这可以通过使用霍尔传感器来获得。