Calibrate AUTOSAR Adaptive Application
Embedded Coder® Support Package for Linux® Applications enables you to calibrate AUTOSAR adaptive applications. You can use the Linux Runtime Manager application to build model, create & deploy application on target, and perform calibration & measurement for the application.
Steps to calibrate an AUTOSAR adaptive application.
Open or create an AUTOSAR adaptive model.
Create a Simulink.Parameter in base workspace and set the storage class to
ExportedGlobalto make it a tunable parameter.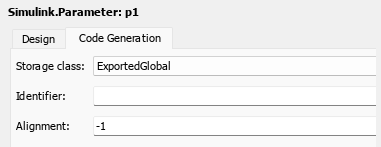
Right-click the signal line that you want to calibrate, and then click the Properties button
 to open the Signal Properties dialog. Set the signal as
to open the Signal Properties dialog. Set the signal as
Test pointto measure the signal.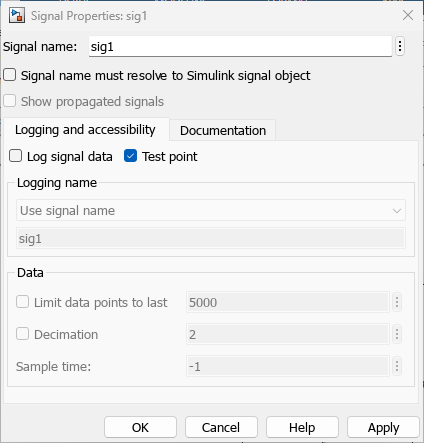
Set the Hardware Implementation > Hardware board in the model configuration parameters to
Embedded Coder Linux Docker Containerfor x86_64 targets.Embedded Coder Linux Docker Container - ARM64for ARM targets.
Select AUTOSAR Code Generation > XCP Server Configuration, set the Transport layer to
XCP On TCP/IP, specify the IP address of the target machine, and port number.Generate code for the model and verify that the application package is generated.
Open the Linux Runtime Manager application by using the command.
linuxRuntimeManager
Connect to the Linux target machine by specifying the target configuration details.
Select Create & Deploy Application Package and choose the application package generated from model to deploy the application package to target.
Select the signals to instrument from the Signals tab after the application is deployed.
Select Monitor & Tune to start calibrating the application.
Change the value of the tunable parameter from the Parameters tab.
Verify the change in parameter value from the Simulation Data Inspector.