Joint Probabilistic Data Association Multi Object Tracker
Joint probabilistic data association tracker
Libraries:
Sensor Fusion and Tracking Toolbox /
Multi-Object Tracking Algorithms
Description
The Joint Probabilistic Data Association Multi Object Tracker block is capable of processing detections of multiple targets from multiple sensors. The tracker uses joint probabilistic data association to assign detections to each track. The tracker applies a soft assignment, in which multiple detections can contribute to each track. The tracker initializes, confirms, corrects, predicts (performs coasting), and deletes tracks. The tracker estimates the state vector and state estimate error covariance matrix for each track. Each detection is assigned to at least one track. If the detection cannot be assigned to any existing track, the tracker creates a new track.
You can enable different JPDA tracking modes by specifying the Type of track confirmation and deletion logic and Value of k for k-best JPDA parameters.
Setting the Type of track confirmation and deletion logic parameter to
'Integrated'to enable the joint integrated data association (JIPDA) tracker, in which track confirmation and deletion is based on the probability of track existence.Setting the Value of k for k-best JPDA parameter to a finite integer to enable the k-best joint integrated data association (k-best JPDA) tracker, which generates a maximum of k events per cluster.
Any new track starts in a tentative state. If enough detections are
assigned to a tentative track, its status changes to confirmed. If the
detection already has a known classification (the ObjectClassID field of
the returned track is nonzero), that corresponding track is confirmed immediately. When a
track is confirmed, the tracker considers the track to represent a physical object. If
detections are not assigned to the track within a specifiable number of updates, the track is
deleted.
Examples
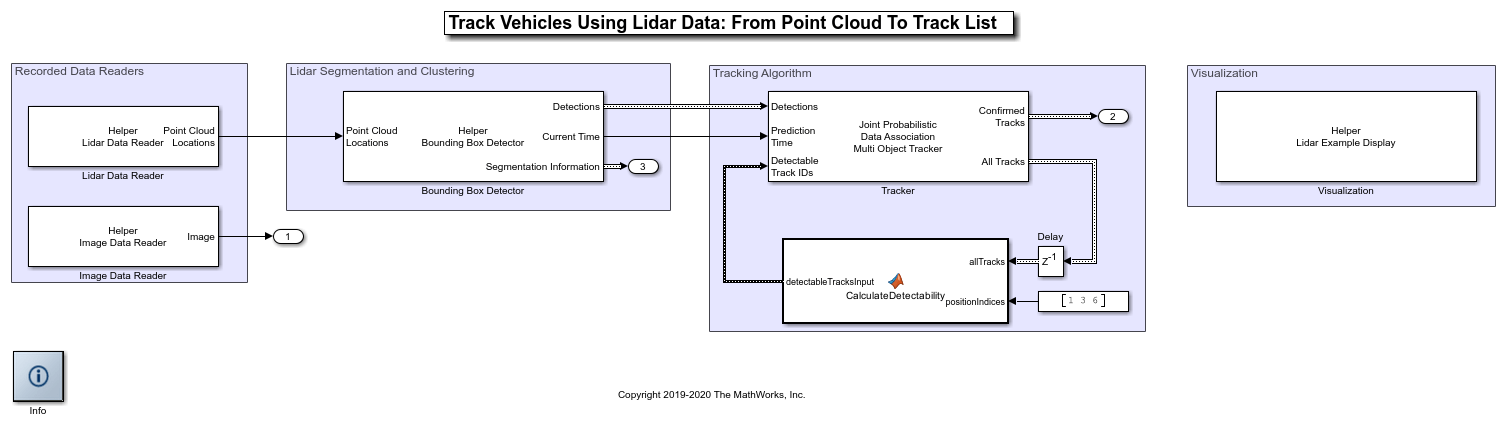
Track Vehicles Using Lidar Data in Simulink
Track vehicles using measurements from a lidar sensor mounted on top of an ego vehicle. Due to high resolution capabilities of the lidar sensor, each scan from the sensor contains a large number of points, commonly known as a point cloud. The example illustrates the workflow in Simulink for processing the point cloud and tracking the objects. The lidar data used in this example is recorded from a highway driving scenario. You use the recorded data to track vehicles with a joint probabilistic data association (JPDA) tracker and an interacting multiple model (IMM) approach. The example closely follows the Track Vehicles Using Lidar: From Point Cloud to Track List MATLAB® example.
Track Closely Spaced Targets Under Ambiguity in Simulink
Track objects in Simulink® with Sensor Fusion and Tracking Toolbox™ when the association of sensor detections to tracks is ambiguous. It closely follows the Tracking Closely Spaced Targets Under Ambiguity MATLAB® example.
Ports
Input
Output
Parameters
Algorithms
In the typical workflow for a tracking system, the tracker needs to determine if a detection can be associated with any of the existing tracks. If the tracker only maintains one track, the assignment can be done by evaluating the validation gate around the predicted measurement and deciding if the measurement falls within the validation gate. In the measurement space, the validation gate is a spatial boundary, such as a 2-D ellipse or a 3-D ellipsoid, centered at the predicted measurement. The validation gate is defined using the probability information (state estimation and covariance, for example) of the existing track, such that the correct or ideal detections have high likelihood (97% probability, for example) of falling within this validation gate.
However, if a tracker maintains multiple tracks, the data association process becomes more complicated, because one detection can fall within the validation gates of multiple tracks. For example, in the following figure, tracks T1 and T2 are actively maintained in the tracker, and each of them has its own validation gate. Since the detection D2 is in the intersection of the validation gates of both T1 and T2, the two tracks (T1 and T2) are connected and form a cluster. A cluster is a set of connected tracks and their associated detections.
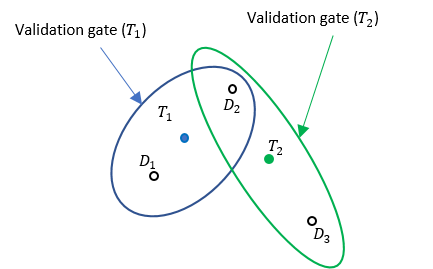
To represent the association relationship in a cluster, the validation matrix is commonly used. Each row of the validation matrix corresponds to a detection while each column corresponds to a track. To account for the eventuality of each detection being clutter, a first column is added and usually referred to as "Track 0" or T0. If detection Di is inside the validation gate of track Tj, then the (i, j+1) entry of the validation matrix is 1. Otherwise, it is zero. For the cluster shown in the figure, the validation matrix Ω is
Note that all the elements in the first column of Ω are 1, because any detection can be clutter or false alarm. One important step in the logic of joint probabilistic data association (JPDA) is to obtain all the feasible independent joint events in a cluster. Two assumptions for the feasible joint events are:
A detection cannot be emitted by more than one track.
A track cannot be detected more than once by the sensor during a single scan.
Based on these two assumptions, feasible joint events (FJEs) can be formulated. Each FJE is mapped to an FJE matrix Ωp from the initial validation matrix Ω. For example, with the validation matrix Ω, eight FJE matrices can be obtained:
As a direct consequence of the two assumptions, the Ωp matrices have
exactly one "1" value per row. Also, except for the first column which maps to clutter,
there can be at most one "1" per column. When the number of connected tracks grows in a
cluster, the number of FJE increases rapidly. The jpdaEvents function
uses an efficient depth-first search algorithm to generate all the feasible joint event
matrices.
Extended Capabilities
Version History
Introduced in R2019bSee Also
Blocks
Functions
Objects
objectDetection|trackingKF|trackingEKF|trackingUKF|trackingCKF|trackingIMM|trackingABF|trackHistoryLogic|objectTrack|staticDetectionFuser|trackerTOMHT|trackerGNN